
Ganggenauigkeit, Zeitwaage
Entwicklung einer Zeitwaage
Die erste Zeitwaage zur Überwachung des Ganges wurde für die Sekundenpendeluhr gebaut und ist auf Bild der Uhr zu sehen - noch ohne Batterien zur Notstromversorgung. Sie besteht aus einer Standard-Experimentierplatine (AVR-Ctrl), dem Funkuhr-Modul EM2S DCF und der Antenne AFET 77,5 von HKW-Elektronik. In der Uhr (hinter dem Pendel) befinden sich eine Gabellichtschranke sowie analoge Sensoren für Druck, Temperatur und Luftfeuchte. Diese 3 Sensorwerte sowie Amplitude und Gangabweichung werden stündlich gespeichert (für maximal 3 Wochen) und gelegentlich auf einen PC übertragen. Da das Funkuhr-Modul nur maximal einen Impuls pro Sekunde liefert, werden Zwischenwerte mittels Quarz (braucht der Mikrocontroller ohnehin) bestimmt, wobei eine Quarz-Heizung (auf den Quarz geklebter Widerstand) dafür sorgt, dass der Quarz immer im Takt schwingt. Die Zeitwaage hat gut 7 Jahre (davon fast 6 Jahre ohne Unterbrechung) das Gangverhalten der Uhr ohne Störung oder Fehler aufgezeichnet. Gelegentliche Stromausfälle wurden mittels Batterien überbrückt.
Natürlich sollte auch die neue Uhr eine Zeitwaage erhalten, aber meine Frau hat gegen das bisherige Design (offene Elektronik auf einem Brett) ihr Veto eingelegt und auch der MicroSet Timer hat bei ihr keine Begeisterung hervorgerufen. Da dachte ich mir, dass es doch möglich sein müsste, eine kleine Zeitwaage mit Speicherung der Daten auf SD-Karte und Übertragung zum PC per WLAN (statt serieller Schnittstelle) zu bauen, die zudem noch billiger ist, als der MicroSet Timer, der in Vollausstattung immerhin rund 1000 $ kostet (zzgl. Einfuhrumsatzsteuer). Ersteres ist gelungen, Letzteres nicht ;-)
Die neue Zeitwaage arbeitet mit 2 Mikrocontrollern: einem SAMD21 auf dem Arduino Nano 33 IoT Board (für die Speicherung der Daten auf einer SD-Karte und die WiFi-Übertragung ins Heimnetz) und einem ATmega328P, der mit den Bibliotheken für die SD-Karte (Arduino-IDE) hart an die Speichergrenze kam. Der ATmega328P erhält die Taktfrequenz von 12,8 MHz von einem VCTCXO (Voltage Controlled Temperature Compensated Crystal Oscillator). Zur Überwachung und Feineinstellung der Frequenz ist ein GPS- oder Funkuhr-Modul angeschlossen, das ein sekündliches Signal liefert.Temperatur, Druck und rel. Luftfeuchte werden von einem kleinen BME280-Modul (in eine Uhr einbaubar) gemessen und zum ATmega328 übertragen. Die Daten werden laufend gemessen, über einen wählbaren Zeitraum gemittelt und dann gespeichert. Die Pendelbewegung wird mittels Lichtschranke gemessen und weitere Lichtschranken (oder Mikroschalter) ermöglichen einen automatischen Aufzug einer Uhr, wofür 12 V und max. 0,7 A zur Verfügung stehen.
Bestellung einer Zeitwaage
Bei entsprechender Nachfrage wird hier zuküftig auch ein "richtiger Shop" eingerichtet. Vorläufig steht nur eine
Bestellvorlage für Emails zur Verfügung. Die Artikelbeschreibungen wurden sorgfältig erstellt -
trotzdem bleiben Irrtümer, Liefermöglichkeit und Änderungen (auch technische) vorbehalten. Detaillierte Hinweise zur Bedienung
und zu den verfügbaren Optionen sind in der Bedienungsanleitung zu finden:
 Zeitwaage.pdf (Bedienungsanleitung, 591 kB)
Zeitwaage.pdf (Bedienungsanleitung, 591 kB)
Zur Auswertung der Daten kann eine Excel-Tabelle verwendet werden: DATALOG.xlsx (317 kB) und Excel-Hinweise.pdf (130 kB)

Artikelnr. 670206: Zeitwaage, Grundgerät inkl. Steckernetzteil 12 V, 1 A und 4 GB SD-Karte aber ohne Batterien/Akkus

Zeitreferenzen
oben: Artikelnr. 670207, GPS-Modul im Gehäuse (53 x 37 x 20 mm), unten: Artikelnr. 670208, DCF77-Modul im Gehäuse
(80 x 40 x 20 mm), beide mit je 2,5 m Kabel

Temperatur, Druck, rel. Luftfeuchte (TpF)
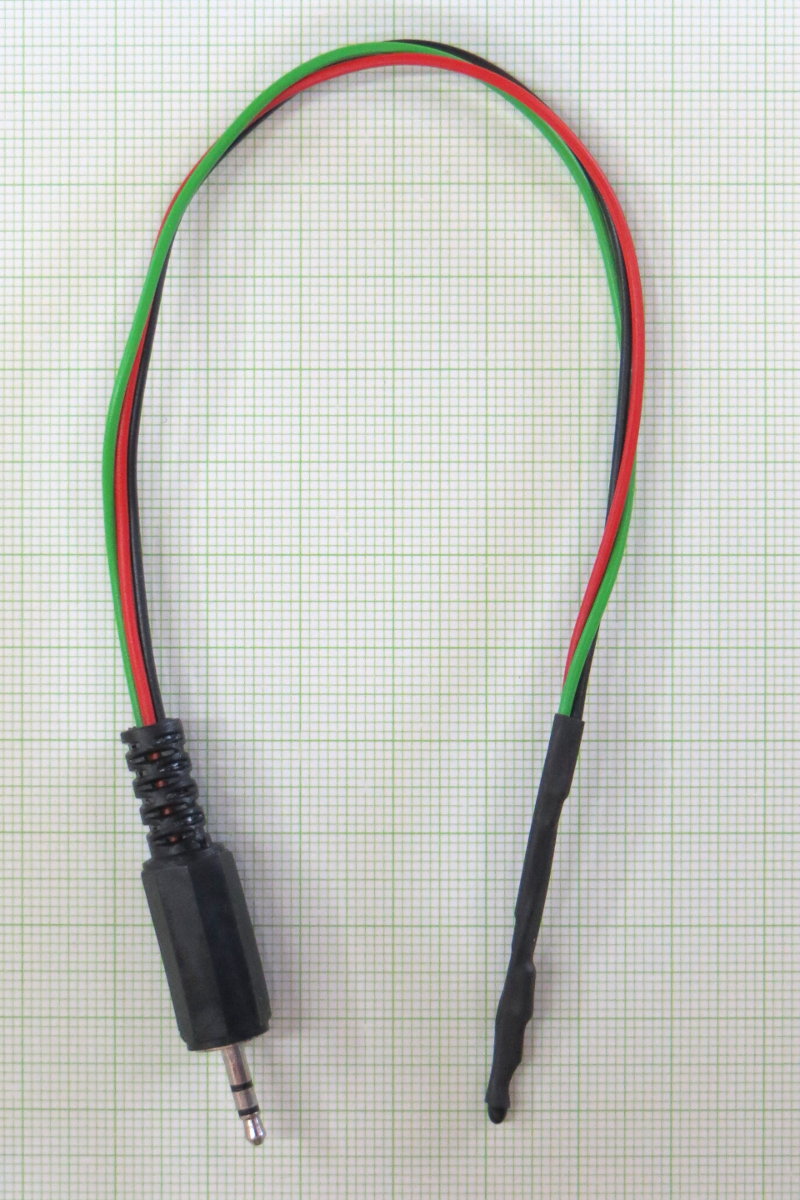
oben: Artikelnr. 670209, TpF-Sensor mit 2 m langen Kabeln und 3 m Spiralschlauch (lose), unten: Artikelnr. 670210,
TpF-Sensor im Gehäuse (26 x 18 x 13 mm)
Artikelnr. 670211, NTC-Temperaturfühler mit Kabellänge bis 3 m nach Wahl
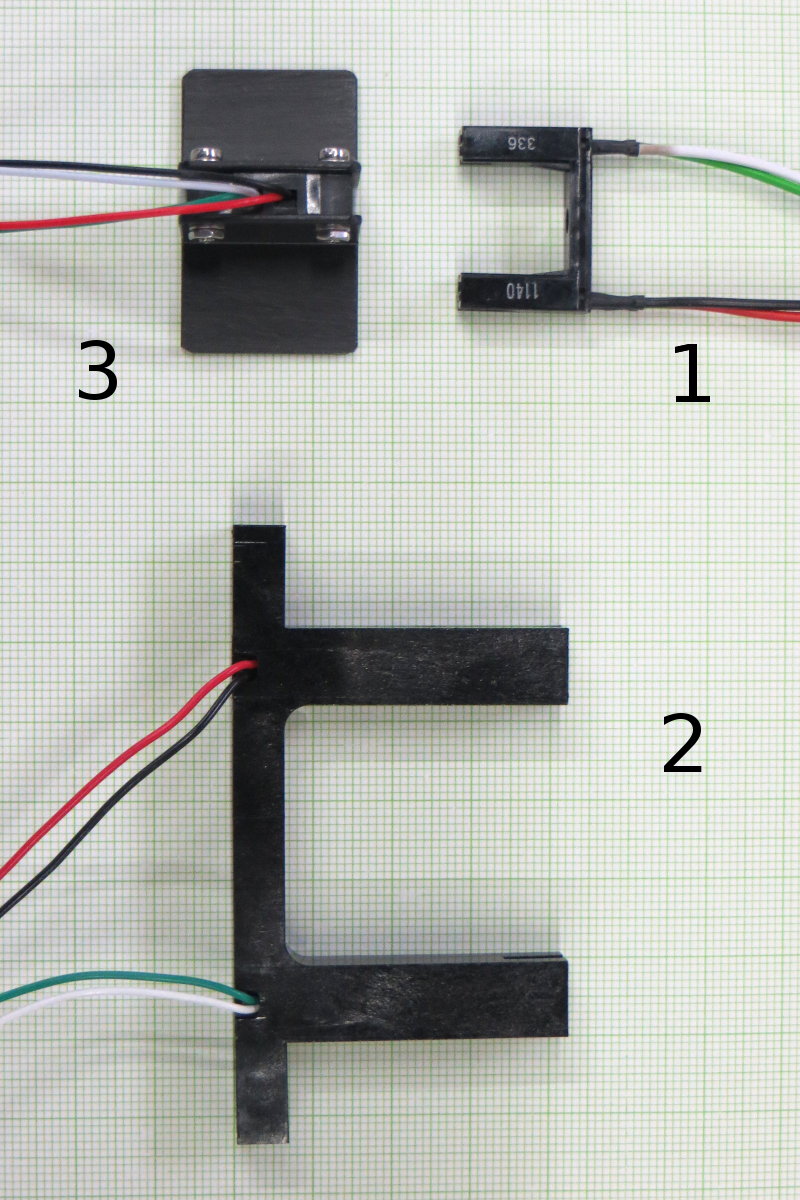
Alle Lichtschranken werden mit ca. 60 cm langen Kabeln und einem Klinkenstecker mit ebenfalls 60 cm Kabel geliefert. Auf Wunsch bereits verlötet. Nr. 1 = Artikelnr. 670212, Lichtschranke mit 14 mm Öffnungsbreite, Nr. 2 = Artikelnr. 670213, Lichtschranke mit 32 mm Öffnungsbreite, Nr. 3 = Artikelnr. 670214, Reflexlichtschranke

Anwendungsbeispiel für die große Lichtschranke Nr. 2
Bestellvorlage
Wenn Sie etwas bestellen möchten, dann kopieren Sie bitte die folgende Bestellvorlage in eine Email, ändern die
gewünschte Menge, geben Name und Adresse an und senden die Email an:
post henschke-geraetebau.de
henschke-geraetebau.de
Der Vertrag kommt zustande mit:
Dr. Martin Henschke - Gerätebau
Dieselstr. 8
50374 Erftstadt
USt-IdNr. gemäß §27a UStG: DE814223446
Wir prüfen dann den Lagerbestand und schicken Ihnen eine Auftragsbestätigung mit der Bankverbindung zur Vorkasse-Überweisung zu. Die bestellten Artikel werden 2 Wochen für Sie reserviert. Sollte das Geld innerhalb dieser Zeit nicht eingegangen sein, dann sind wir nicht länger zur Lieferung verpflichtet und ihre Bestellung wird annulliert. Nach Zahlungseingang werden die Artikel i.d.R. innerhalb von 1 - 3 Werktagen versendet.
Wir bemühen uns, ausverkaufte Artikel zeitnah mit ❌ zu kennzeichnen. Trotzdem kann es vorkommen, dass Artikel bereits vergriffen sind, wofür wir um Ihr Verständis bitten. Nicht verfügbare Artikel sind i.d.R. bereits nachbestellt bzw. in der Produktion.
Aktuell (Sommer 2026) sind alle Artikel vorrätig.
Sehr geehrte Damen und Herren,
falls ab Lager lieferbar, bestelle ich hiermit folgende
Artikel (Preise inkl. MwSt):
Artikelnr. Bezeichnung Anzahl EUR/Stück
670206 Zeitwaage inkl.:
1. GPS- oder DCF77-Modul
2. TpF-Sensor 670209 oder 670210
3. Lichtschranke 1 oder 2 oder 3 0 1000.-
670207 GPS-Modul 0 50.-
670208 DCF77-Modul (Funkuhr) 0 50.-
670209 TpF-Sensor mit 2 m Kabel 0 40.-
670210 TpF-Sensor im Gehäuse 0 40.-
670211 NTC-Temperaturfühler 0 25.-
670212 Lichtschranke 1 (14 mm) 0 30.-
670213 Lichtschranke 2 (32 mm) 0 30.-
670214 Reflexlichtschranke 0 30.-
Versand (frei ab 300.- EUR) 7.-
Mit freundlichen Grüßen
Vorname Nachname
Straße Nr.
Plz Wohnort
Meine E-Mail-Adresse an DHL weitergeben: nein
Widerrufsrecht: Sie haben das Recht, binnen vierzehn Tagen ohne Angabe von Gründen diesen Vertrag zu widerrufen. Die Details finden Sie in der Widerrufsbelehrung, die Ihnen auch zusammen mit der Auftragsbestätigung und nochmals (in Papierform) mit der Ware zugesendet wird.
Datenschutzerklärung: Wir speichern Ihre Daten nicht in einer Datenbank sondern nur in der Rechnung (Textverarbeitung). Zwecks Versand erfolgt eine Weitergabe der Daten an DHL, wobei wir Ihre E-Mail-Adresse nur auf ausdrücklichen Wunsch weitergeben, wenn Sie von DHL eine Benachrichtigung über die geplante Zustellung erhalten wollen.
Messungen an der Sekundenpendeluhr
Im folgenden Diagramm ist die Ganggenauigkeit der Uhr über 299 Wochen bzw. 50232 h gezeigt. Glücklicherweise wurde die maximale Anzahl der Datenpunkte, die in einer Excel-Grafik pro Linie dargestellt werden können, von damals gut 32000 auf jetzt über 65000 angehoben.
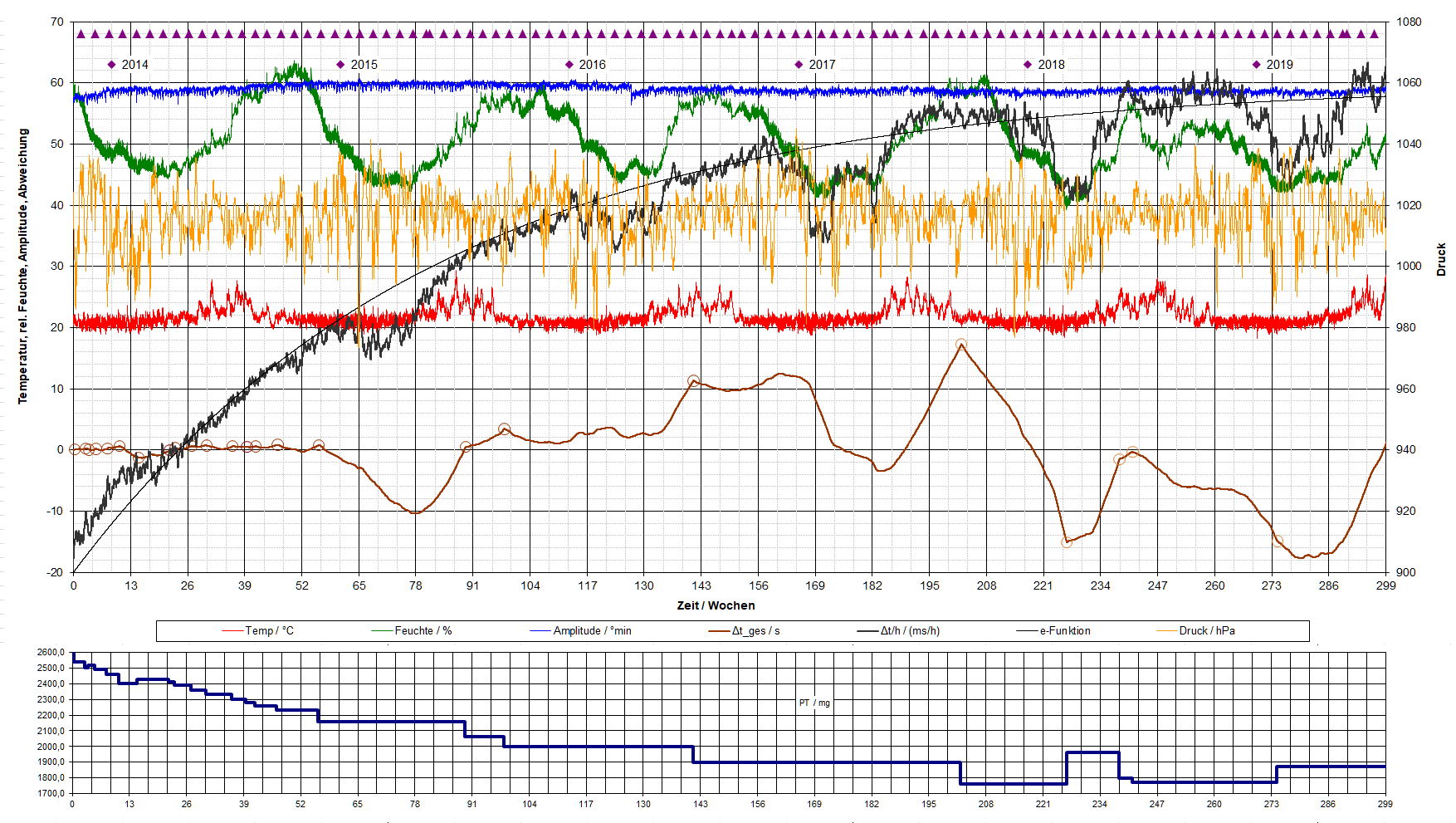
Das Diagramm kann zum Vergrößern angeklickt werden. Die Kreise auf der Kurve für die Gangabweichung (Δt_ges) zeigen die Zeitpunkte an, an denen das Gewicht auf dem Pendelteller geändert wurde, welches dann in dem unteren Diagramm in mg angegeben ist. Die Dreiecke ganz oben zeigen die Zeitpunkte des Aufziehens an. Die wichtigste Kurve ist die schwarze, die den aktuellen Gangfehler in ms/h anzeigt. 1 ms/h entspricht dabei 0,024 s/d (Sekunden pro Tag), was die üblichere Einheit ist. Bei dieser Kurve sind die geänderten Gewichte auf dem Pendelteller herausgerechnet, so dass die langfristige Veränderung des Gangverhaltens seit Laufzeitbeginn zum Ausdruck kommt.
Es ist zu erkennen, dass die Uhr seit dem Start um rund 75 ms/h bzw. 1,8 s/d schneller wurde, was einer Pendel-Schwerpunktverschiebung um 41 µm nach oben entspricht. Dabei folgt die Verschiebung in etwa einer e-Funktion, die auf einen Grenzwert zuläuft (in dem Diagramm als dünne schwarze Kurve ebenfalls eingezeichnet). Was kann die Ursache dafür sein? Eine Möglichkeit sind undichte Barometer- bzw. Dichtedosen. Wenn eine Barometerdose undicht wird, dann strömt Luft ein und die Dose dehnt sich aus. In der Folge würde der Schwerpunkt allerdings nach unten und nicht nach oben verschoben. Daher scheiden die Barometerdosen als Ursache aus. Bei den Dichtedosen ist nicht ganz klar, ob sie unter Über- oder Unterdruck stehen. Da die Dosen beim Zulöten nach der Gasbefüllung erhitzt wurden, ist aber ein geringer Unterdruck wahrscheinlich. Weiterhin erfolgte das Löten im unbelasteten Zustand und erst danach wurden die Kompensationsgewichte angehangen, was auch zu einem Unterdruck führt. Bleibt noch die Möglichkeit, dass in den Dichtedosen noch ein Rest Luft war (statt reines Argon) und der Luftsauerstoff mit der Zeit wegoxidiert. Das würde zum Zusammenziehen der Dosen führen und wäre eine plausible Erklärung für eine gleichförmige Verschiebung des Schwerpunktes.
Die mit den Jahren immer stärker werdenden Schwankungen im Gangverhalten (speziell im Frühjahr, wenn die Luftfeuchte am geringsten ist) können aber nicht mit den Dichtedosen erklärt werden. Daher geht mein Verdacht in Richtung der Kohlefaser-Pendelstange, die sich mit der Zeit zusammenziehen könnte. Ursächlich dafür dürften die recht erheblichen Spannungen sein, die beim Pultrudieren (Strangziehen) auf das Material einwirken und nach der Aushärtung des Epoxidharzes in dem Materialverbund "gespeichert" sind und sich erst über Jahre abbauen (eine e-Funktion entspricht bei solchen Prozessen der Erwartung). Das erklärt aber auch noch nicht die zunehmend "sprunghafte" Abhängigkeit des Ganges von der Luftfeuchte. Bei trockener Luft im Winter ist die Uhr signifikant langsamer als im Sommer / Herbst bei hoher Luftfeuchtigkeit. Hier bleibt nur die Vermutung, dass das alternde Epoxidharz diese Probleme verursacht. Da die Abhängigkeit von der Luftfeuchte nichtlinear ist, gibt es praktisch keine Möglichkeit zur Kompensation.
Im Zusammenhang mit Präzisionspendeluhren wird häufig eine Abweichung von 1 - 2 s pro Monat genannt, um die Qualität der Uhren zu verdeutlichen. Harrison wollte sogar weniger als 1 s in 100 Tagen erzielen. Beides wird von dieser Uhr gelegentlich erreicht (die 100 Tage nur mit viel Wohlwollen). Trotzdem ist die Abweichung über's Jahr gesehen viel zu groß und eine permanente Geschwindigkeitszunahme sollte eine Präzisionsuhr auch nicht aufweisen. Insofern sind Beobachtungszeiträume von weniger als 1 Jahr für Präzisionspendeluhren wenig aussagekräftig.
Messungen an der Pendeluhr mit Harrisons Barometerkompensation
Hier werden die Gangwerte der Pendeluhr frei nach Harrison (PUH) vorgestellt. Die Uhr hängt in der Küche, wo sie gelegentlich von der warmen Luft des Herdes angepustet wird. Ebenso ist sie dem Durchzug ausgesetzt, wenn nach dem Kochen gelüftet wird. Eine Messreihe vom Okt. 2020:
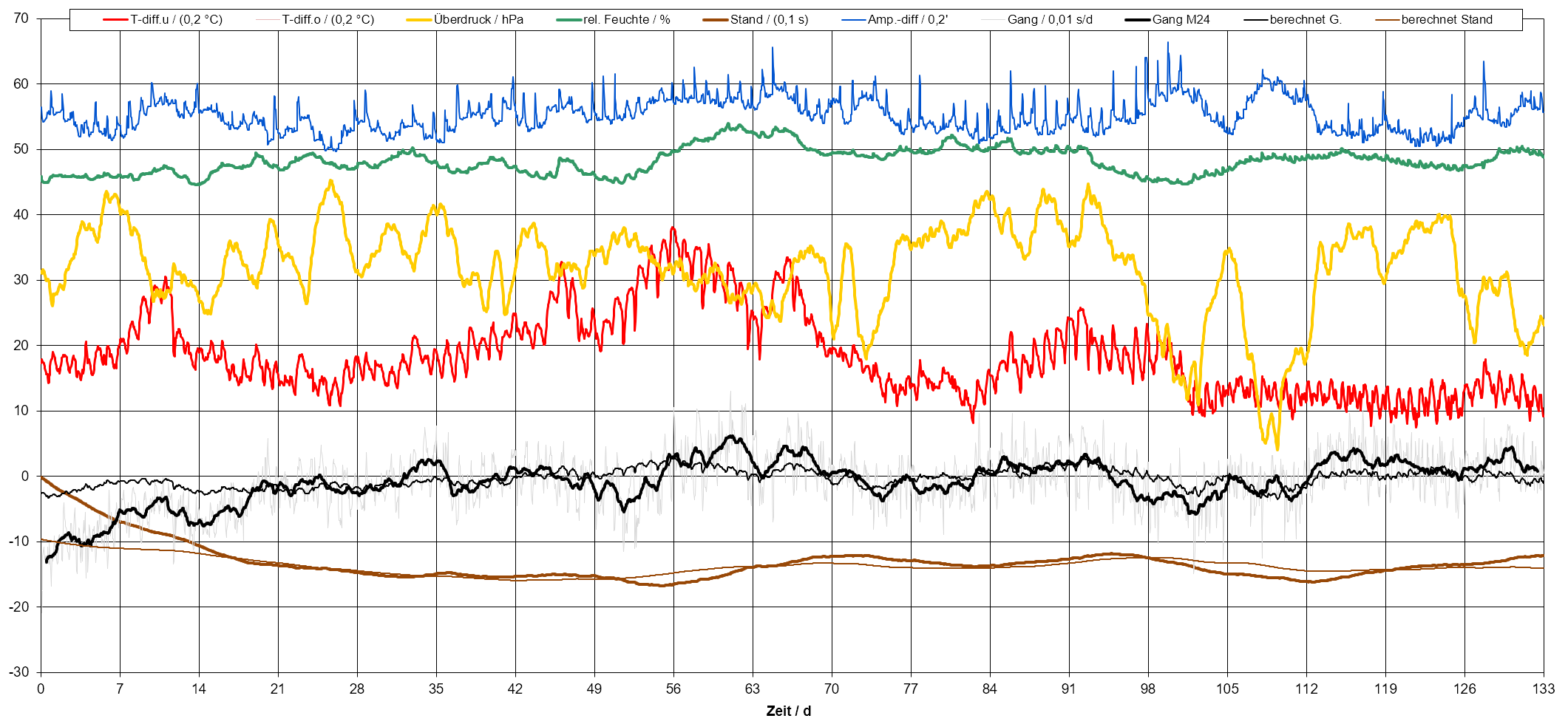
Das Diagramm kann zum Vergrößern angeklickt werden. Es wurde mit der Excel-Tabelle erstellt, die oben auch zum Download bereitsteht. Die Darstellung ist etwas anders als im ersten Diagramm: es gibt nur eine y-Achse und die meisten Werte sind als Differenz zu einem "Nullwert" eingetragen. Die Nullwerte sind 20°C, 970 hPa und 202' (Bogenminuten) für die Temperatur (rot), den Druck (gelb) und die Amplitude (blau). Die Temperatur mit dem Index "u" wird hinter der Pendellinse gemessen und die Temperatur mit dem Index "o" hinter der Pendelfeder. Letztere ist hier zur besseren Übersicht nicht dargestellt. Der Stand (braun), also die Abweichung von der richtigen Uhrzeit, ist in 1/10 Sekunden eingetragen, womit 10 Skalenteile 1 s entsprechen. Der Stand ist so "gedreht", dass er im Diagramm halbwegs horizontal verläuft. Das entspricht einem größeren oder kleineren Gewicht auf dem Pendelteller und ändert nichts an den Abhängigkeiten. Der Gang ist die Abweichung in 0,01 Sekunden pro Tag und in hellgrau und schwarz eingezeichnet. Die dicke schwarze Linie ist dabei der gleitende Mittelwert über 24 h.
Die spitzen Peaks, die häufig in der blauen Linie der Amplitude zu sehen sind, treten immer dann auf, wenn Sonnenstrahlen durch Reflexionen im Raum die Uhr erreichen. Dabei kommt es zu minimalen Zeitabweichungen an der Lichtschranke. Die meisten Peaks sind also vermutlich Messfehler ohne physikalische Relevanz. Die teilweise heftigen Schwankungen im längerfristigen Temperaturverlauf (bis zu 30 Skalenteile x 0,2°C = 6°C) sind auf den Betrieb während der Sommermonate zurückzuführen. Der letzte Messwert wurde am 24.10.2020 aufgezeichnet.
Trotz dieser suboptimalen Bedingungen ist das Gangverhalten relativ gut. Nachdem die Uhr in den ersten 2 Wochen etwas schneller wurde, hält sie seitdem die Zeit mit einer Schwankungsbreite von ±0,25 s. Die berechnete Abweichung ist mit einer dünnen braunen Linie im Diagramm dargestellt. Sie wurde an die Messwerte angepasst, was zu Parametern für Druck und Temperatur von 0,0011 s/(d hPa) bzw. 0,0088 s/(d °C) führte. Der Druck ist also nahezu optimal kompensiert, während die Temperatur leicht überkompensiert erscheint. Allerdings ist die Anpassung nicht sehr gut, was dafür spricht, dass noch andere Effekte eine Rolle spielen, die nicht im matematischen Modell erfasst sind. Die Wirkungsweise der Druckkompensation ist besonders gut während der letzten 5 Wochen zu erkennen. Druck und Amplitude verlaufen gegensätzlich, d.h. bei hohem Druck verringert sich die Amplitude und die theoretisch erwartete Kompensation tritt ein :-)
Seit einigen Jahren wird zur Beurteilung von schwingenden Systemen gern die Allan Varianz herangezogen. Tom van Baak (TvB) zeigt in einer Präsentation die Auswertung für die Clock B, die hier zusammen mit der PUH dargestellt ist:
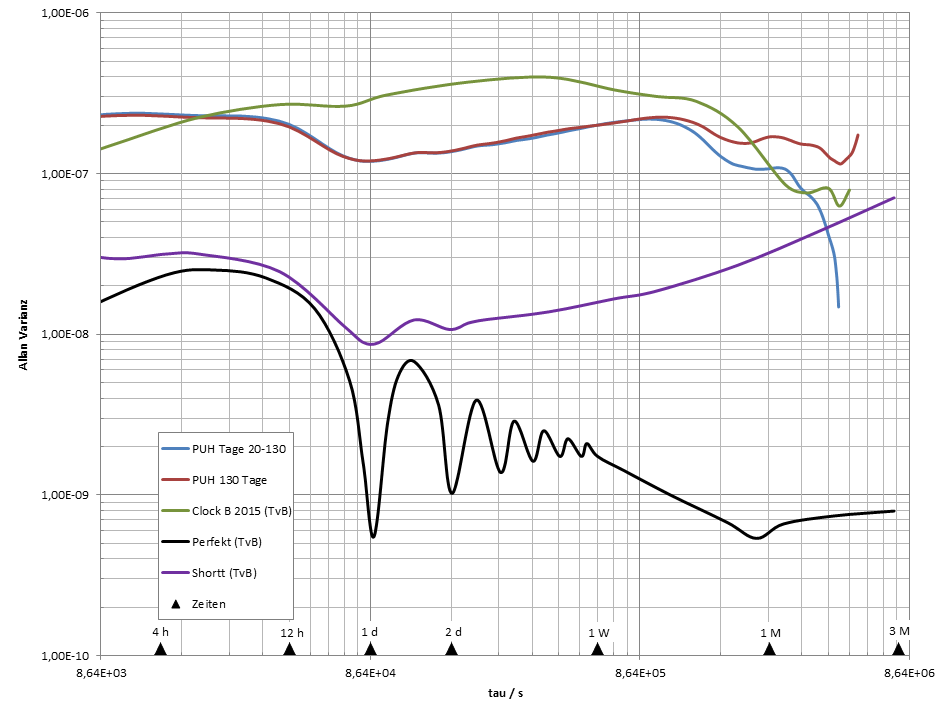
Zum Ende jeder Kurve nimmt die Aussagekraft ab, da auch die Anzahl der verwendeten Messwerte immer kleiner wird. TvB hatte das in seiner Auswertung berücksichtigt und die Kurve etwas früher abgebrochen. Mir ist aber kein allgemein akzeptiertes Abbruchkriterium bekannt und deshalb sind hier alle Werte dargestellt.