
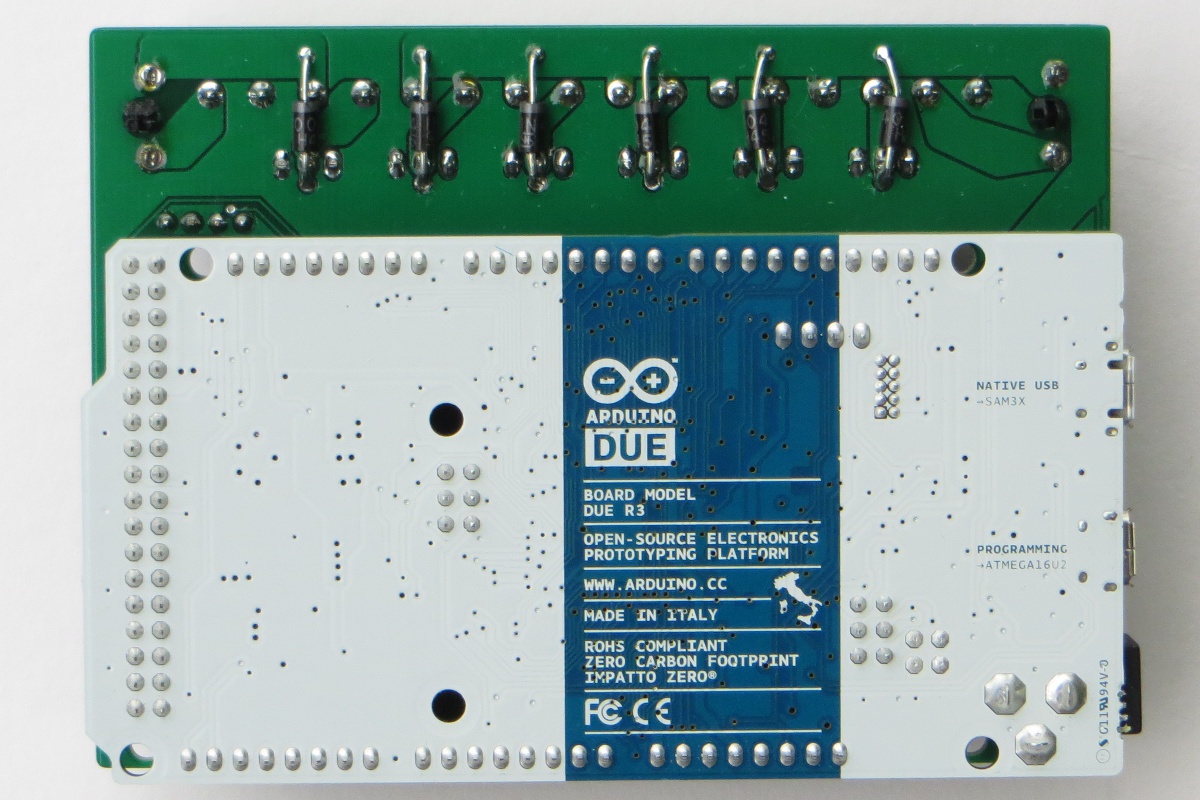
RADDS für den Arduino Due
English Version (pdf): UserGuide_v2
RADDS ist die Abkürzung für "RepRap Arduino-Due Driver Shield" und ist ähnlich aufgebaut wie das weit verbreitete RAMPS 1.4 von Johnny Russell.
Das RADDS-Board bietet folgende Anschlussmöglichkeiten:
- 6 Schrittmotoren, z.B. 3 Achsen und 3 Extruder (2 Treiber sind mit doppelten Stiftleisten zum Parallel-Betrieb von 2 Motoren ausgestattet, z.B. z-Achse beim Mendel-Prusa)
- 6 Hochstrom-Verbraucher, z.B.: Heizbett, 3 Hotend-Heizungen und 2 Lüfter
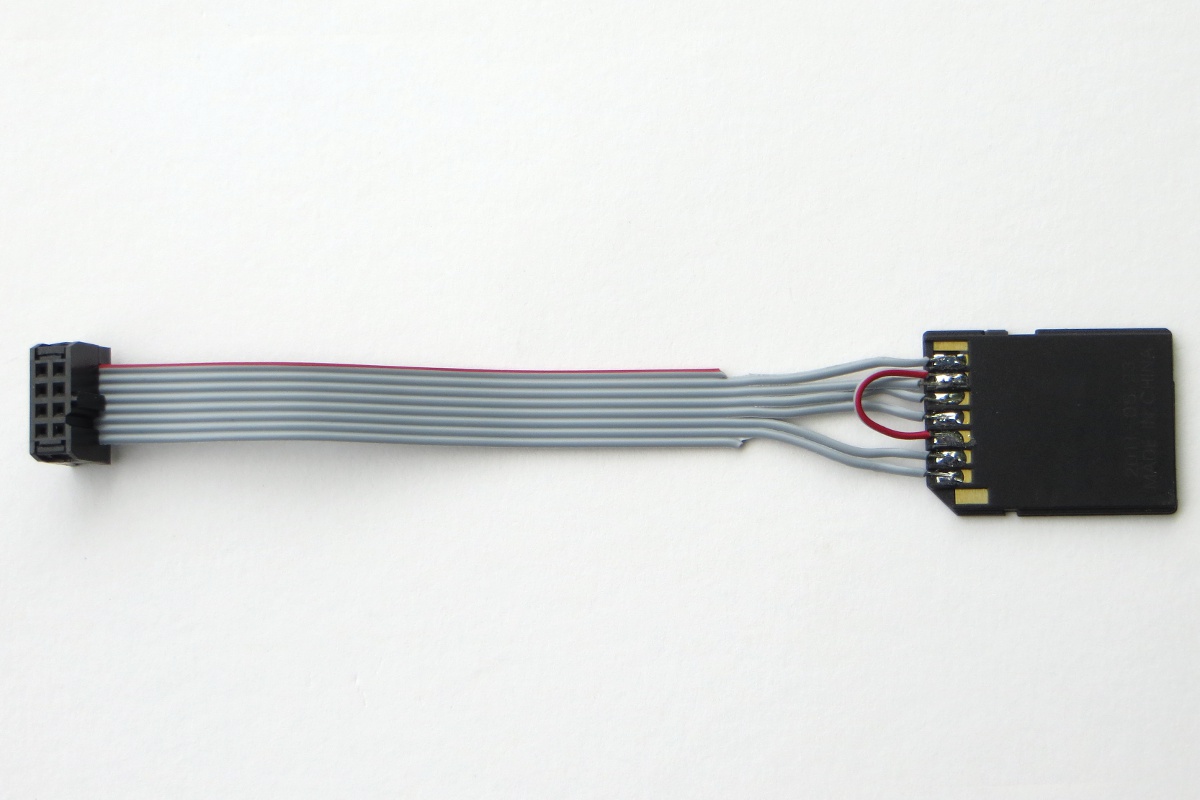
- SD-Karte (Micro-SD-Einschub auf dem Board, alternativ externer SD-Einschub)
- Standard LCD (5 V) mit z.B. 4x20 Zeichen (Controller HD44780 kompatibel)
- Drehencoder mit Drucktaster
- Reset- und Back-Taster (ab V1.1)
- 6 Endstops (3 x min. und 3 x max., z.B. Hall-E-Endstops)
- 5 Thermistoren und ein ADC ohne Vorwiderstand, z.B. Heizbett-Temperatur, 3 x Hotend-Temperatur, Druckraum-Temperatur
- 3 Servos (externe Stromversorgung erforderlich, 3.3V PWM)
- I2C, SPI, CAN, DAC, RS232 und 8 Digital-Pins sind über Stiftleisten zugänglich
Weitere Highlights:
- EEPROM, da im Due - anders als im Mega - nicht vorhanden
- Kontroll-Leds für Stromversorgung und Hochstrom-Verbraucher
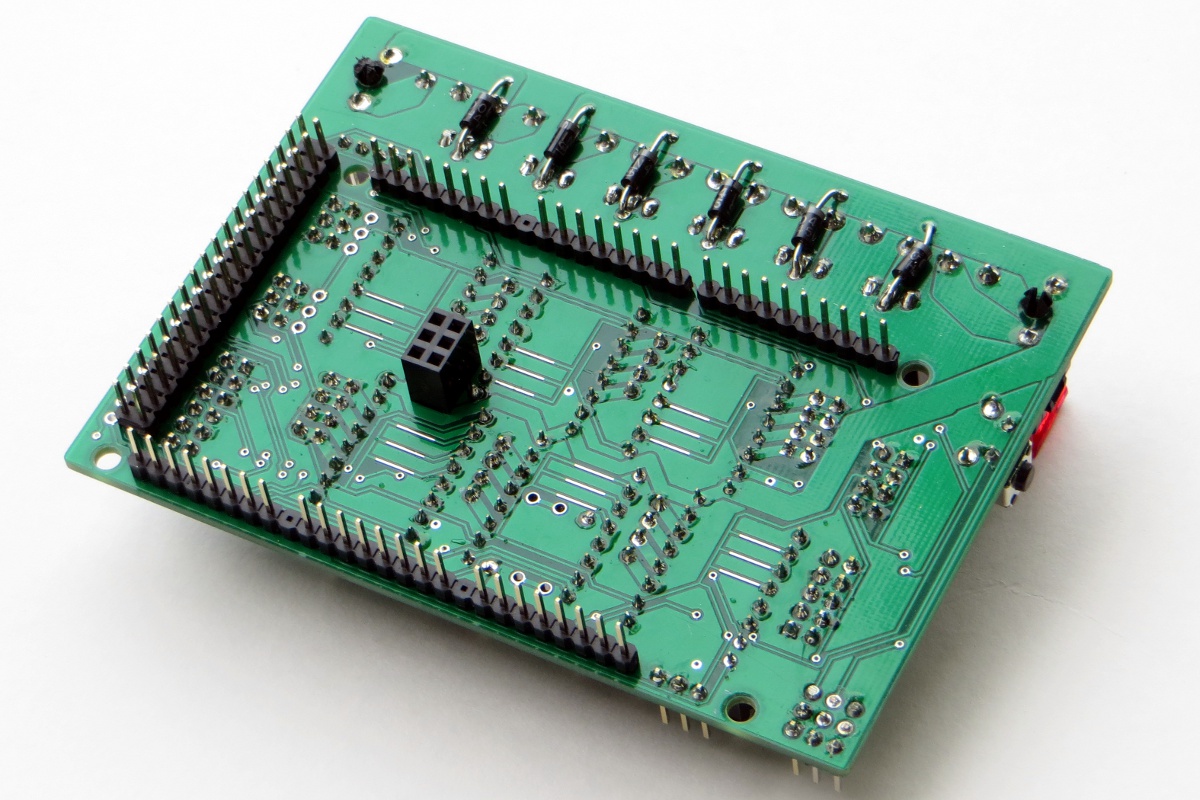
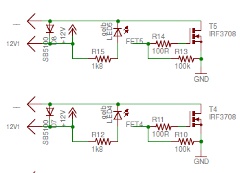
- Freilaufdioden an den FETs
- Kfz-Sicherungen statt unpräziser Thermosicherungen
- Anschluss LCD, Thermistoren und SD-Karte mittels Schneid-Klemm-Buchsen und Flachbandkabel möglich
- Belastbarkeit des Heizbett-FETs liegt bei mindestens 15 A ohne Kühlkörper
- Hochwertige Schraubklemmen
- Betrieb mit 10 - 25 V möglich (DC-DC-Wandler zur Versorgung des Due mit 8.5 V, ab V1.2)
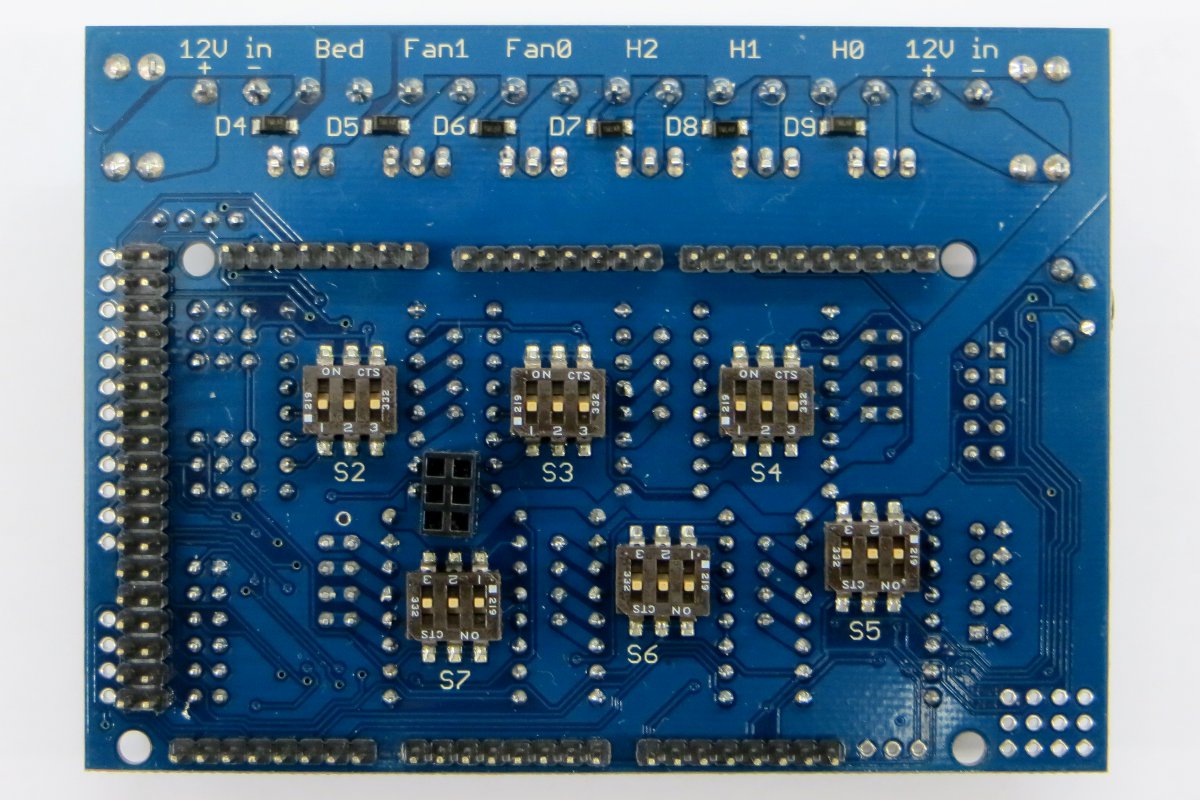
- Mikroschalter zur Einstellung der Mikroschritte (ab V1.2, bei V1.0, V1.1: Leiterbahnen durchtrennen)
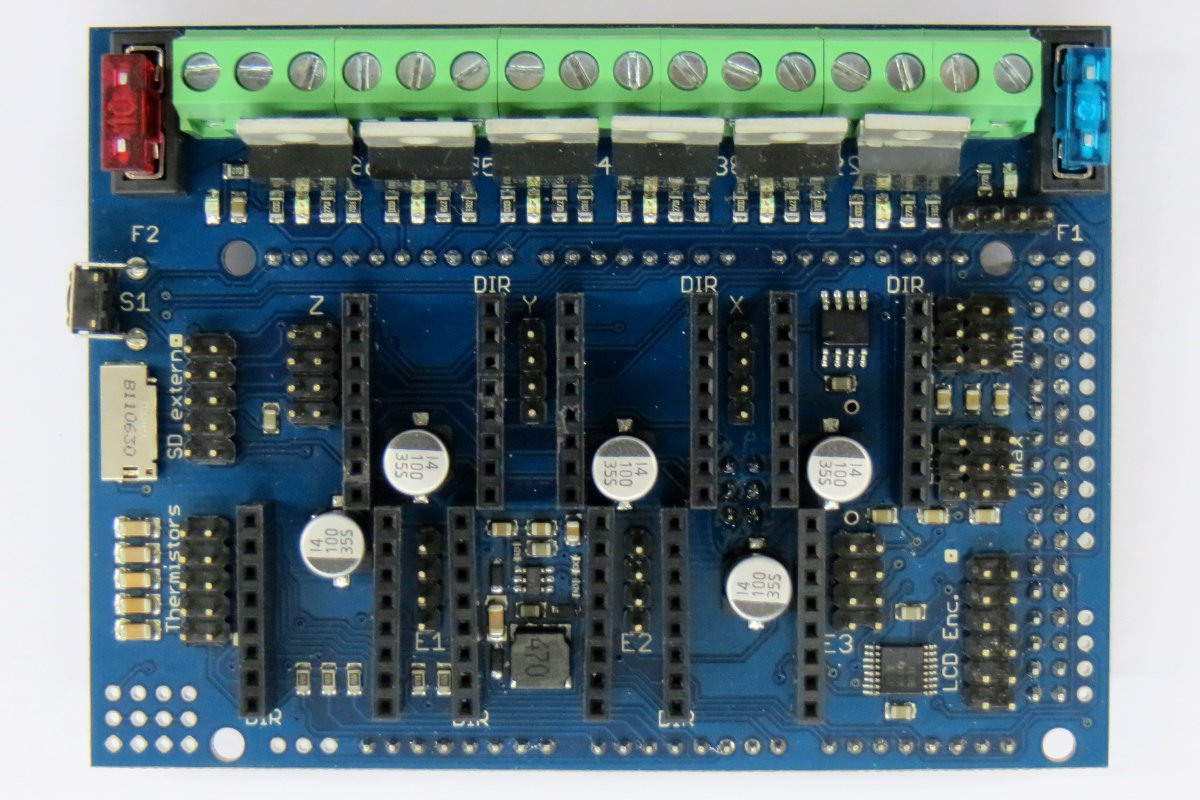
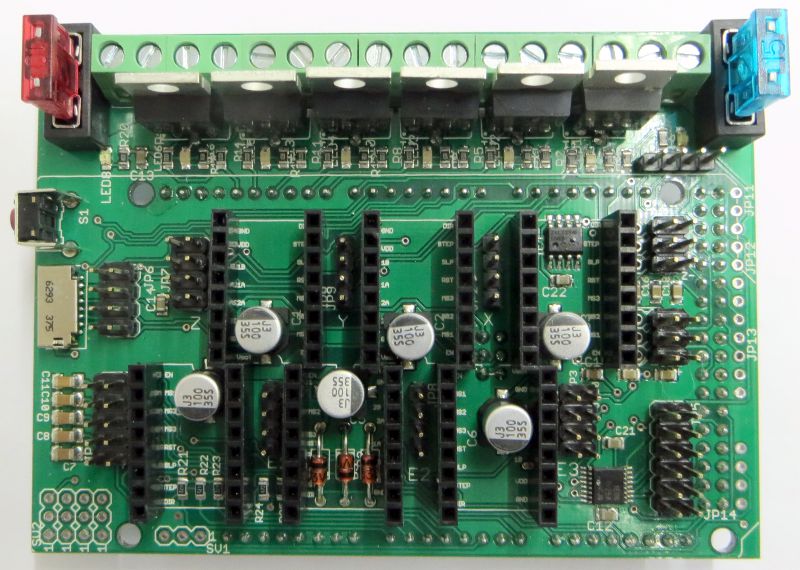
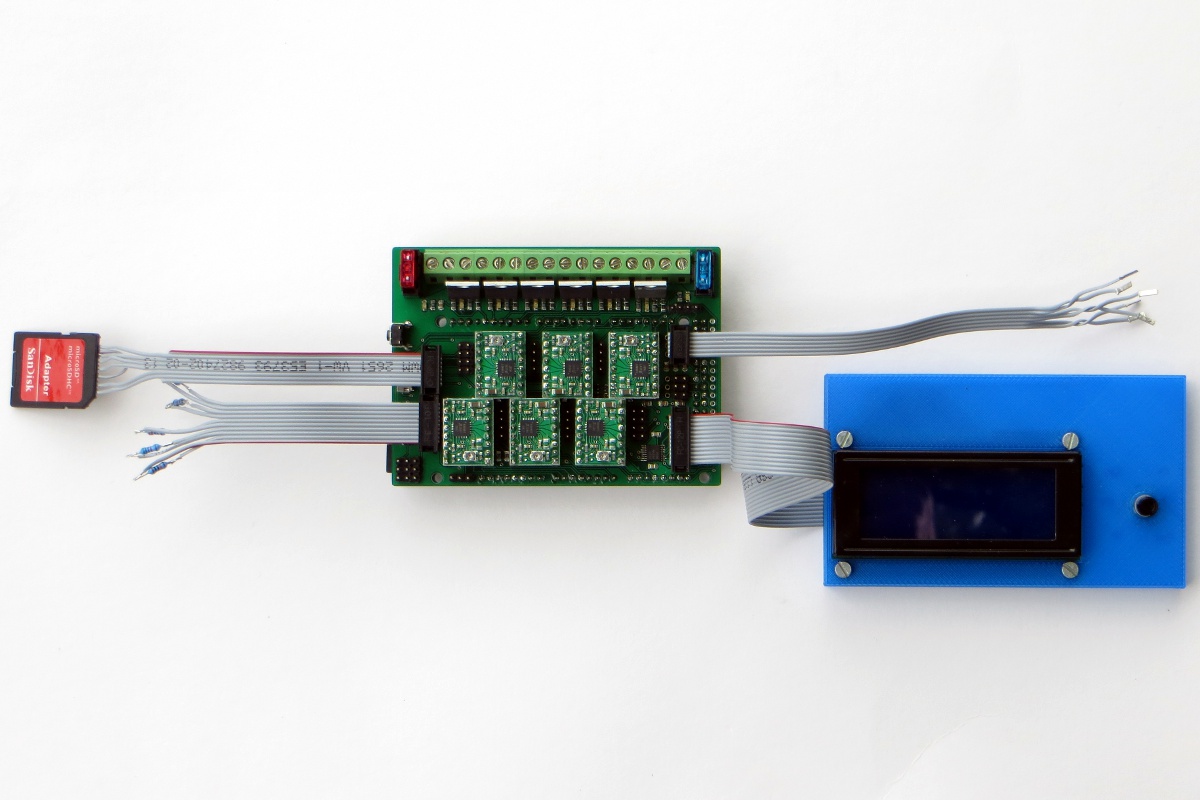
Einige Bilder (zum Vergrößern anklicken):
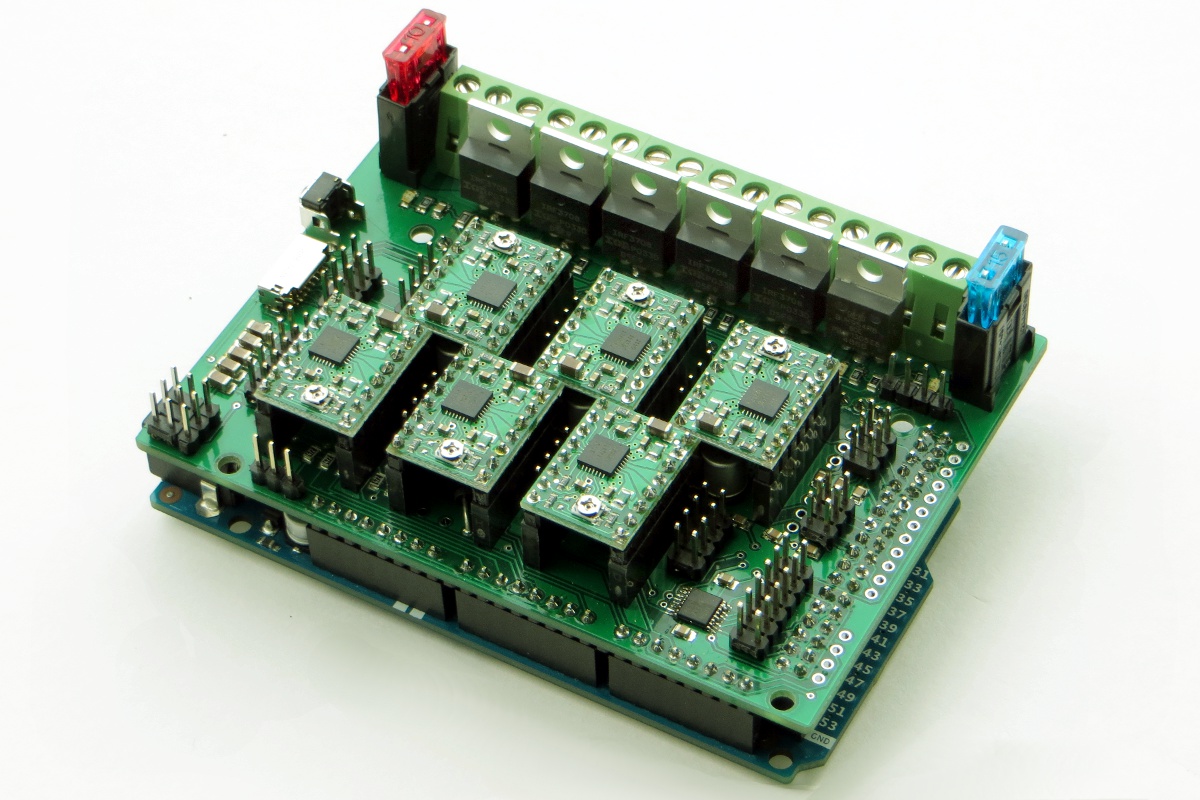
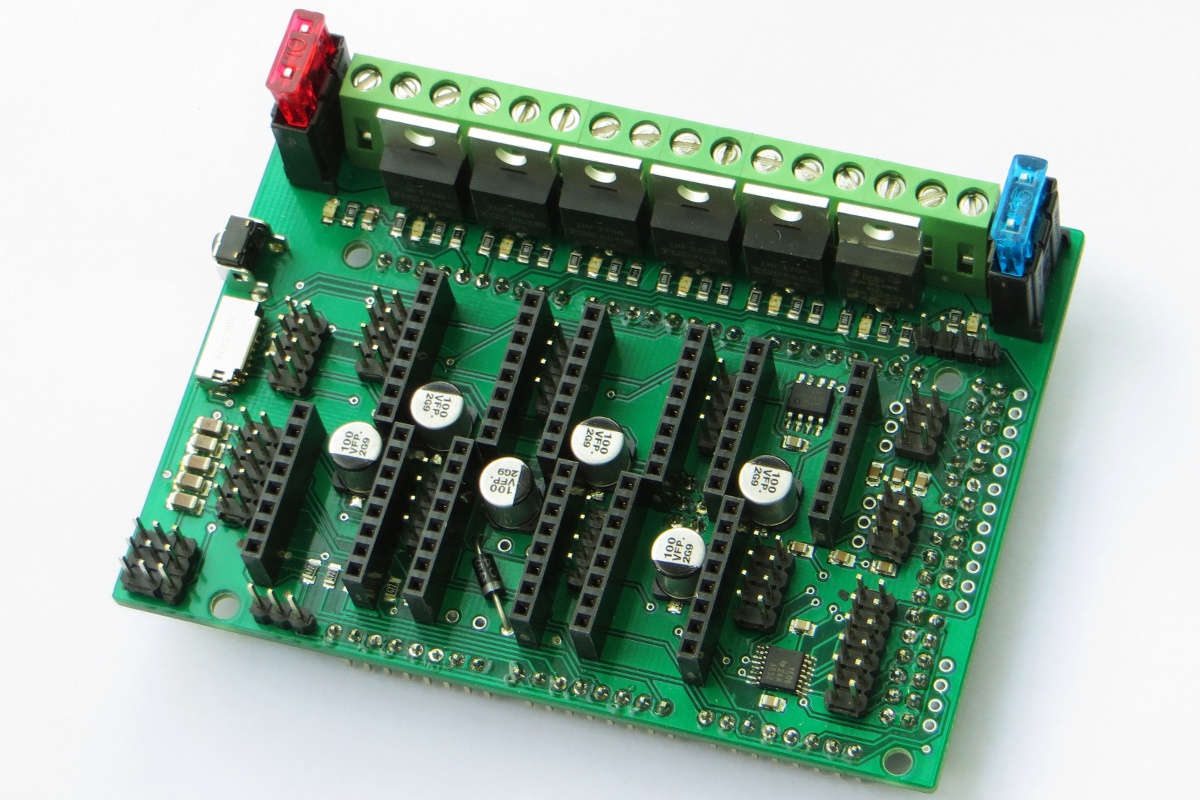
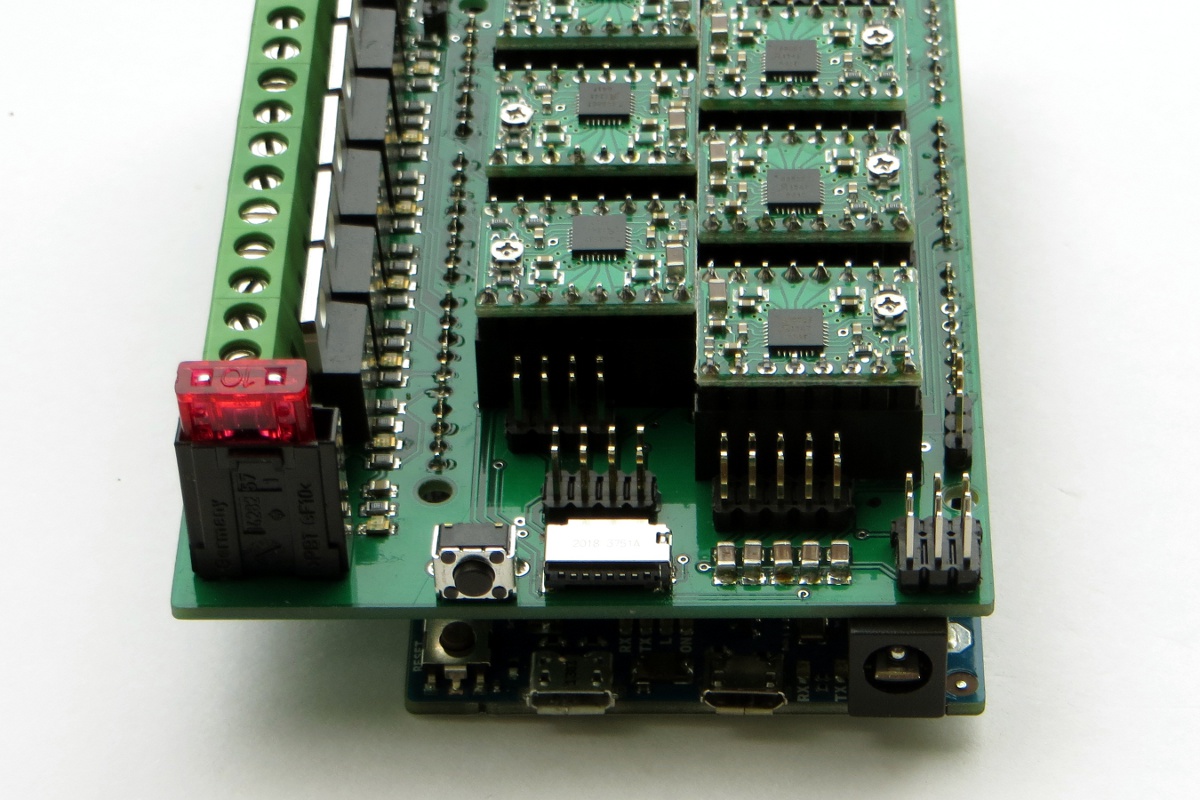
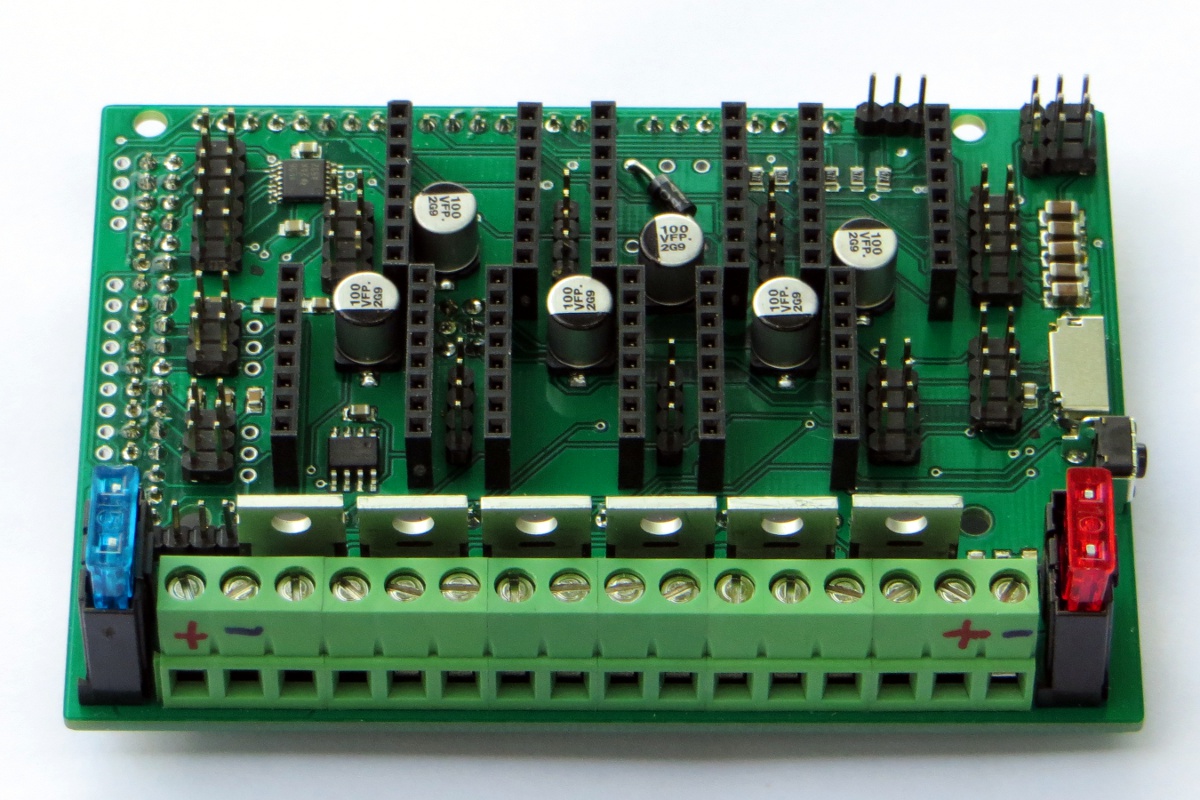
RADDS Version 1.2, 1.5 und 1.6 (Mikroschritt-Einstellung der Motortreiber siehe RAPS128):
Dokumentation (zum Download als *.pdf bzw. *.zip Bilder anklicken):
Wichtig: in der Repetier Firmware ist #define STEPPER_HIGH_DELAY 2 zu setzen, da der Due zu schnell für die Treiber ist.

Dieses
Werk bzw. der Inhalt steht unter einer
Creative Commons 3.0 Unported License: Namensnennung - Nicht-kommerziell - Weitergabe unter gleichen Bedingungen.
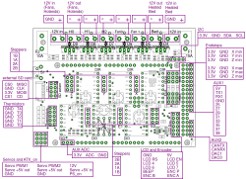
Anschlussbelegung (bei älteren Versionen RADDS_18_doc.pdf und davor ist AUX2 falsch beschriftet)
Testprogramm
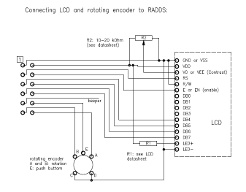
LCD und SD-Karte anschließen (Version 1.1, 1.2, 1.5, 1.6)
Tipps zum Auflöten der Bauteile bei Version 1.0: PDF-Datei
LCD und SD-Karte anschließen (Version 1.0): PDF-Datei
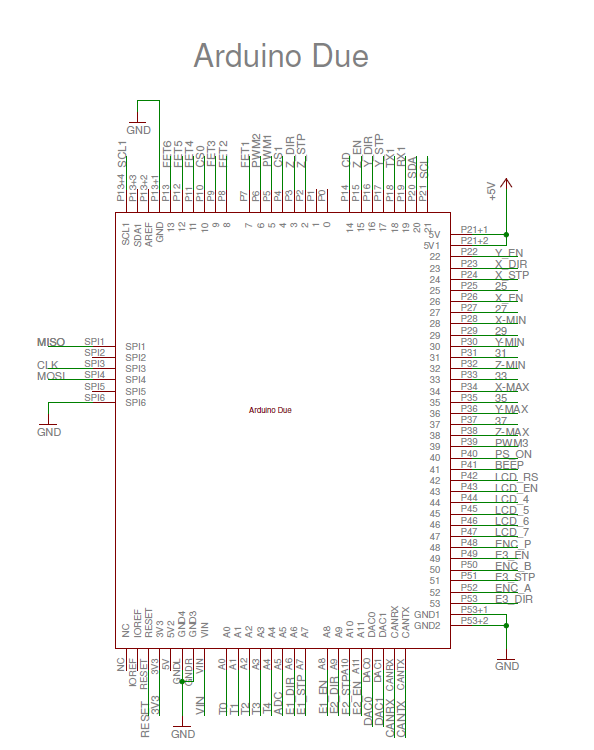
PIN-Belegung des Due-Boards
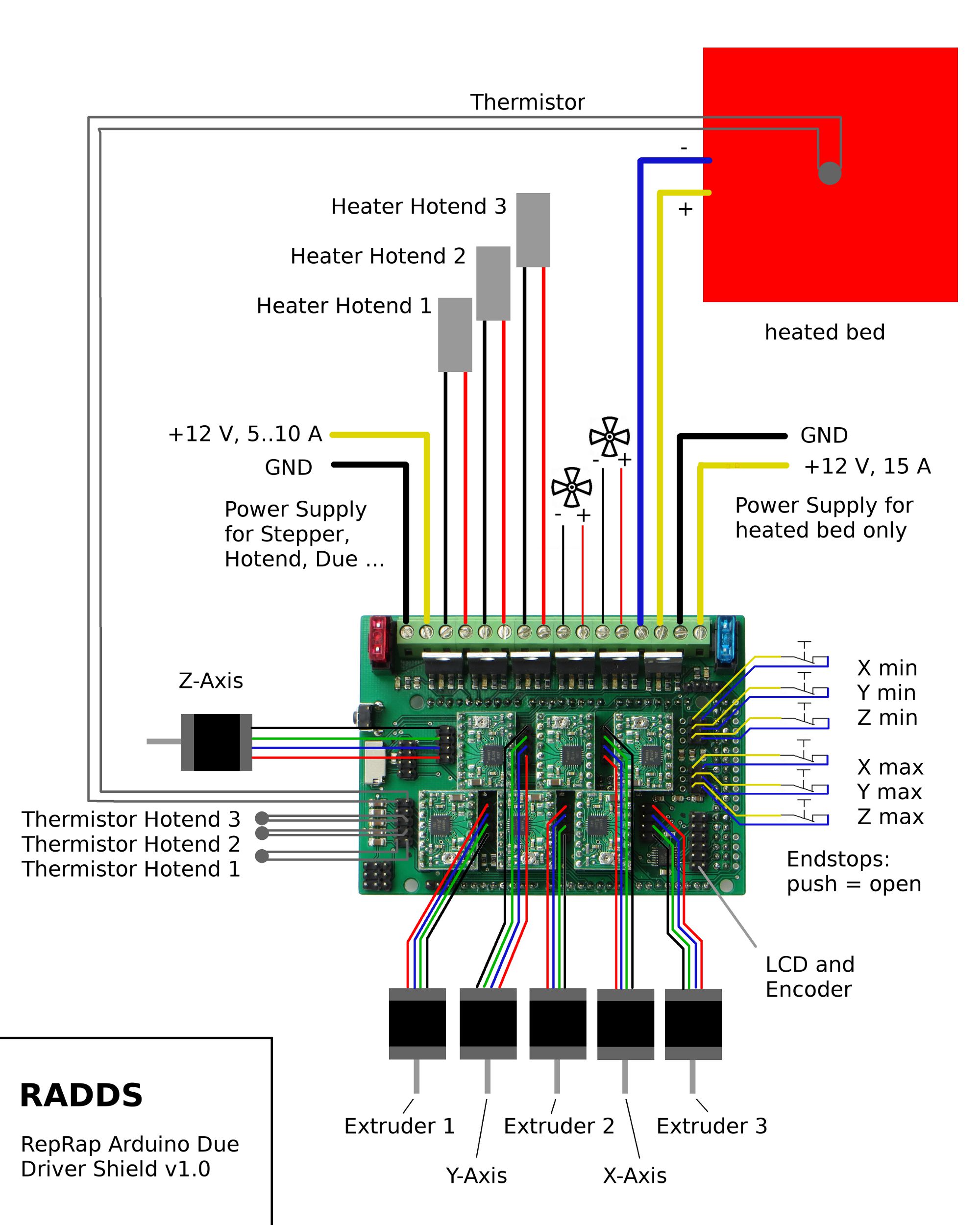
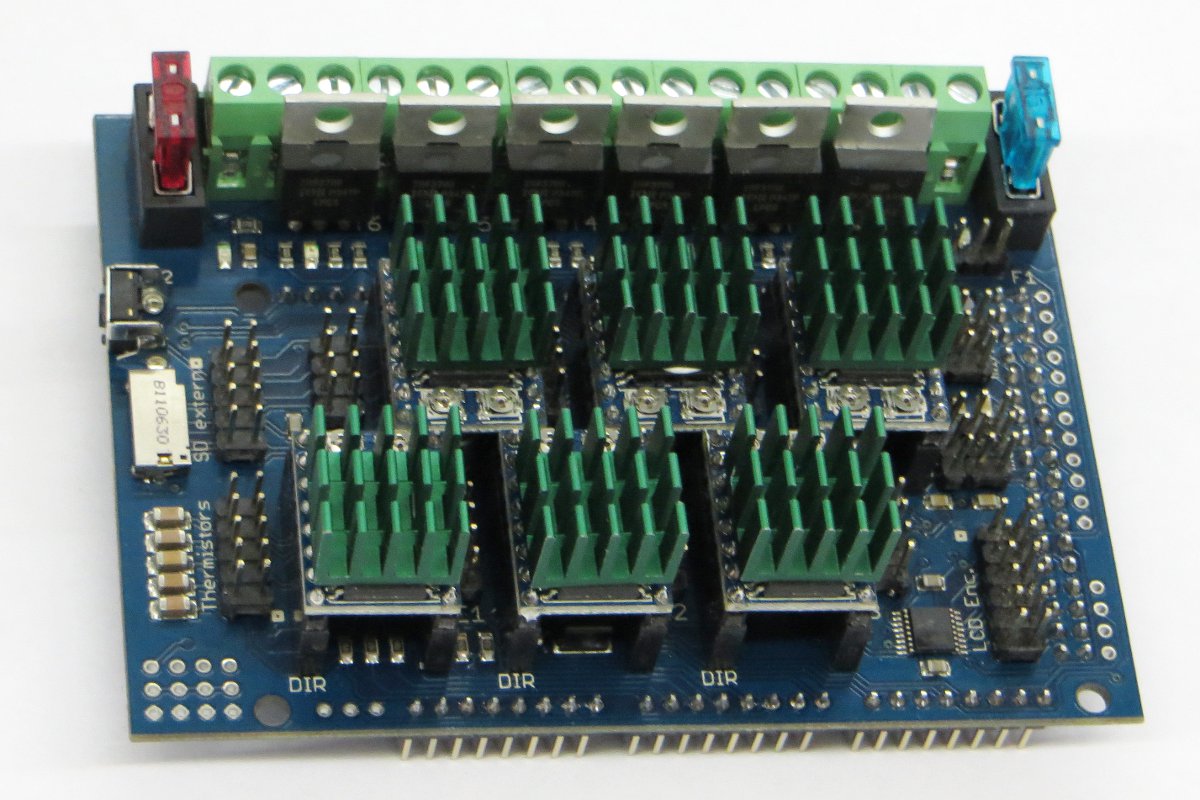
Verkabelung der Platine (Achtung: Pololus mit dem Poti nach außen aufstecken!)
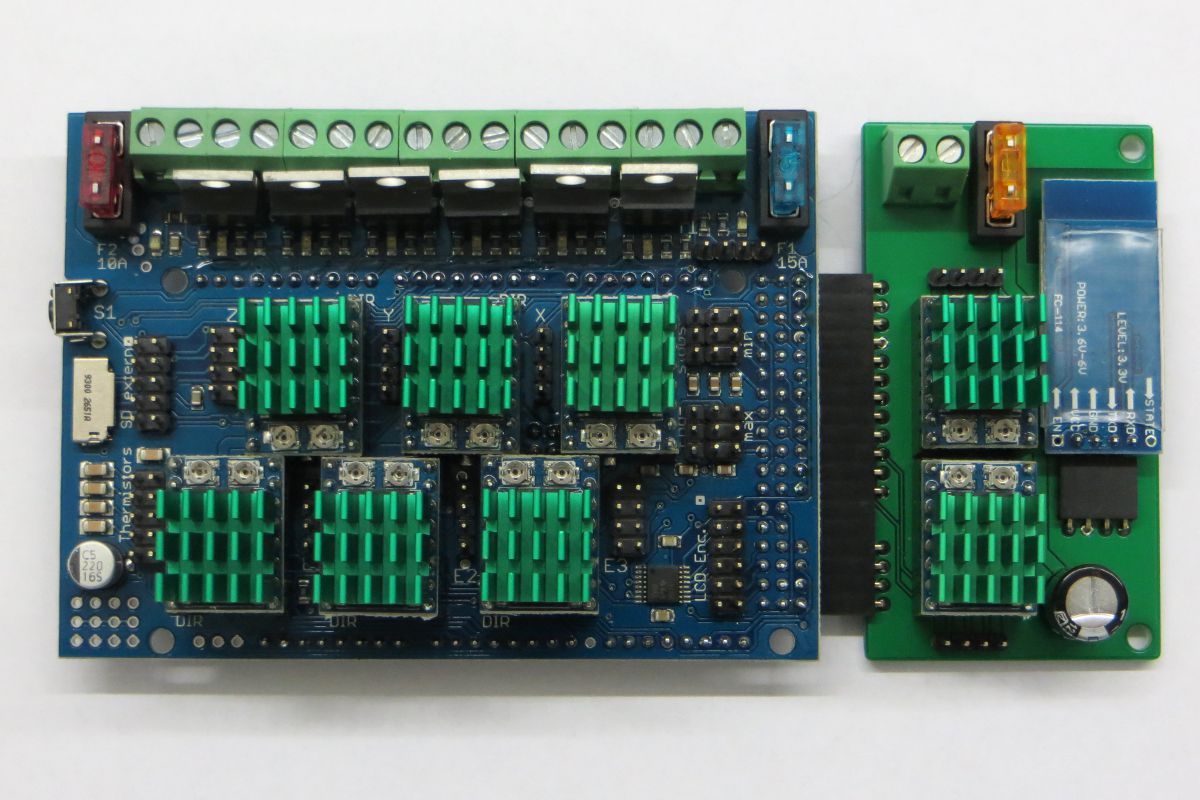
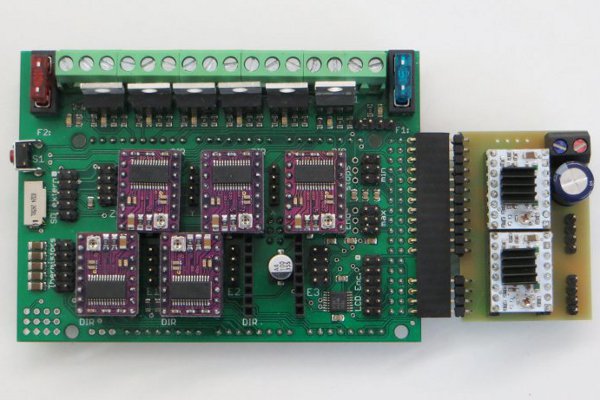
Erweiterungsboard für 2 zusätzliche Stepper-Treiber und Bluetooth
Dokumentation Version 2 mit Fotos und Beispielprogramm: Zip-Datei
Foto Version 1: jpg-Datei
{kind=link}
Pinbelegung Version 1: PDF-Datei
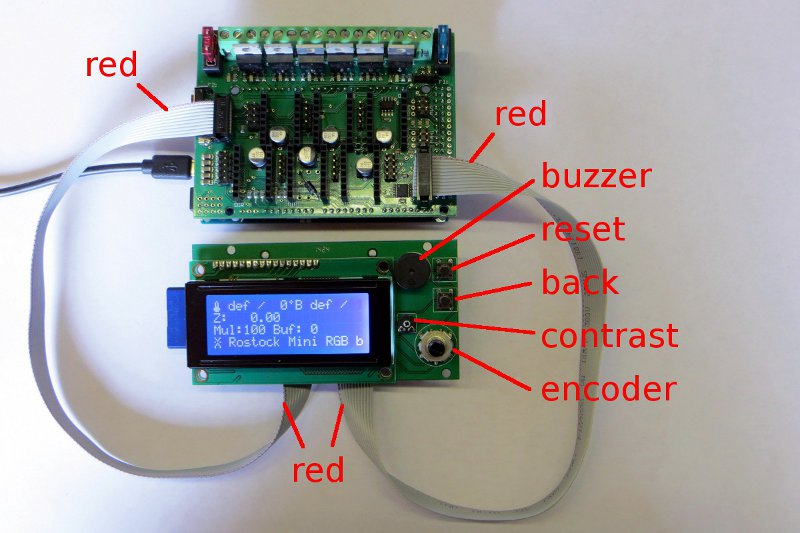
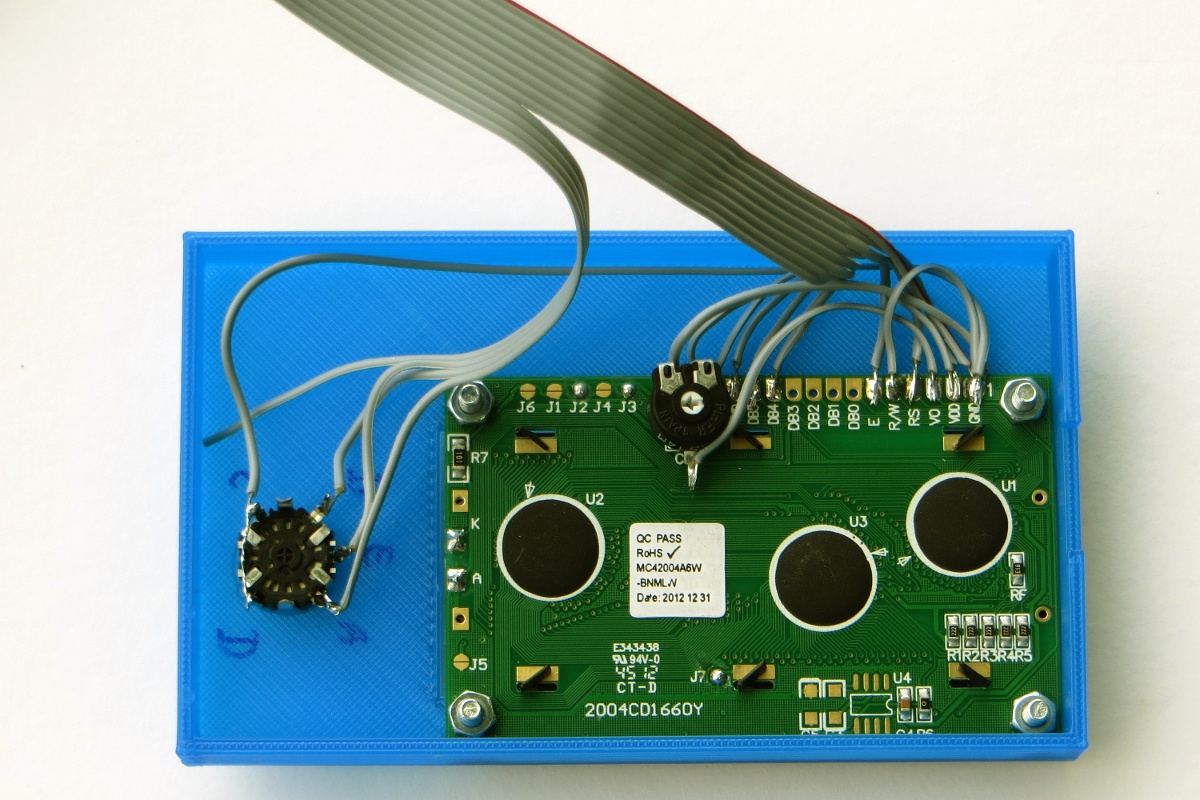
LCD-Display mit Drehencoder und SD-Karteneinschub
Mit dem Back-Taster kann aus Untermenüs in das jeweils übergeordnete Menü gesprungen werden, ohne dass der Drehencoder erst auf "zurück" gedreht und dann gedrückt werden muss.
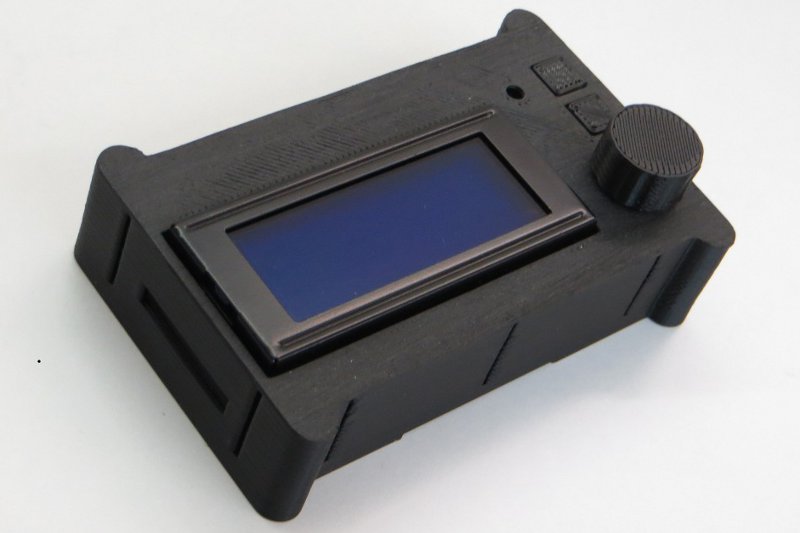
Gehäuse für das LCD-Display incl. Drehknopf und Taster
OpenSCAD und STL-Datei des Gehäuses: Zip-Datei. Platine mit Maßen: LCD_RADDS_02.pdf
RADDS mit 24 V betreiben
Wenn das RADDS-Board V1.0 oder V1.1 mit 24 V betrieben wird, dann können statt der einen Diode D1 drei Zener-Dioden mit ca. 4 V und 1,3 Watt eingelötet werden, damit der Arduino-Due weiterhin über das RADDS-Board mit Strom versorgt werden kann. Die Zener-Dioden "verbraten" dann ca. 12 V und am Due kommen auch nur 12 V an, was der Spezifikation entspricht. Wichtig ist, dass die Dioden in Sperrichtung betrieben werden, d.h. sie müssen "verkehrt herum" eingebaut werden. Siehe Bild (zum Vergrößern anklicken).
LCD und SD-Karte ohne eigene Platine anschließen (erste Test-Version):
Hall-E-Endstop
Der Hall-Effekt-Endstop nutzt einen Magnetfeld-Sensor um beim Erreichen der Home- oder Endposition einer Druckerachse auszulösen. Daher muss auch ein Magnet (z.B. D = 4 mm, H = 1 mm) vorgesehen werden, der sich an den Sensor annähert. Dabei ist die Orientierung nicht egal => vorher ausprobieren. Der Sensor liefert ein analoges Signal, dass zur magnetischen Flussdichte proportional ist und mit einem voreingestellten Wert (mittels Potentiometer) verglichen wird. Der Vorteil dabei ist, dass die Einstellung der Auslöseposition über ein Potentiometer deutlich feinfühliger ist, als die meisten mechanischen Konstruktionen mit relativ groben Schrauben.
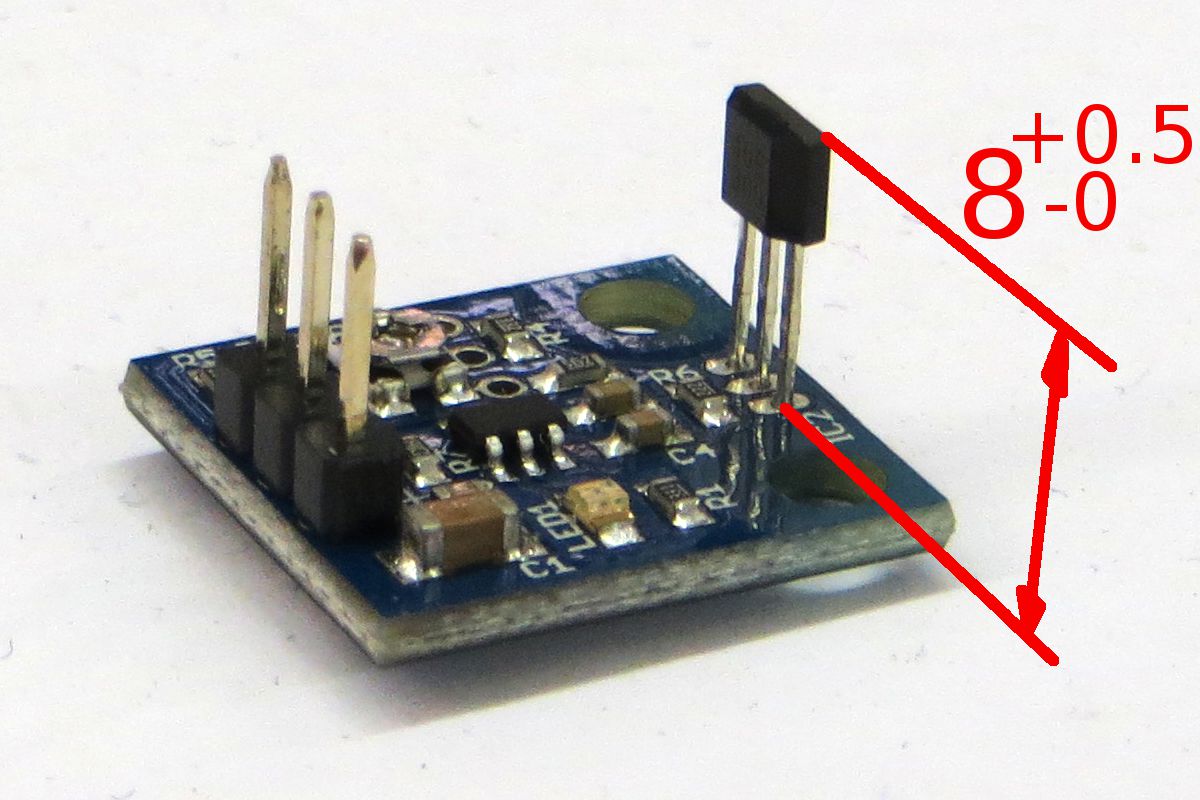
Position des Hall-Sensors auf der
Platine.

Ansicht von oben.
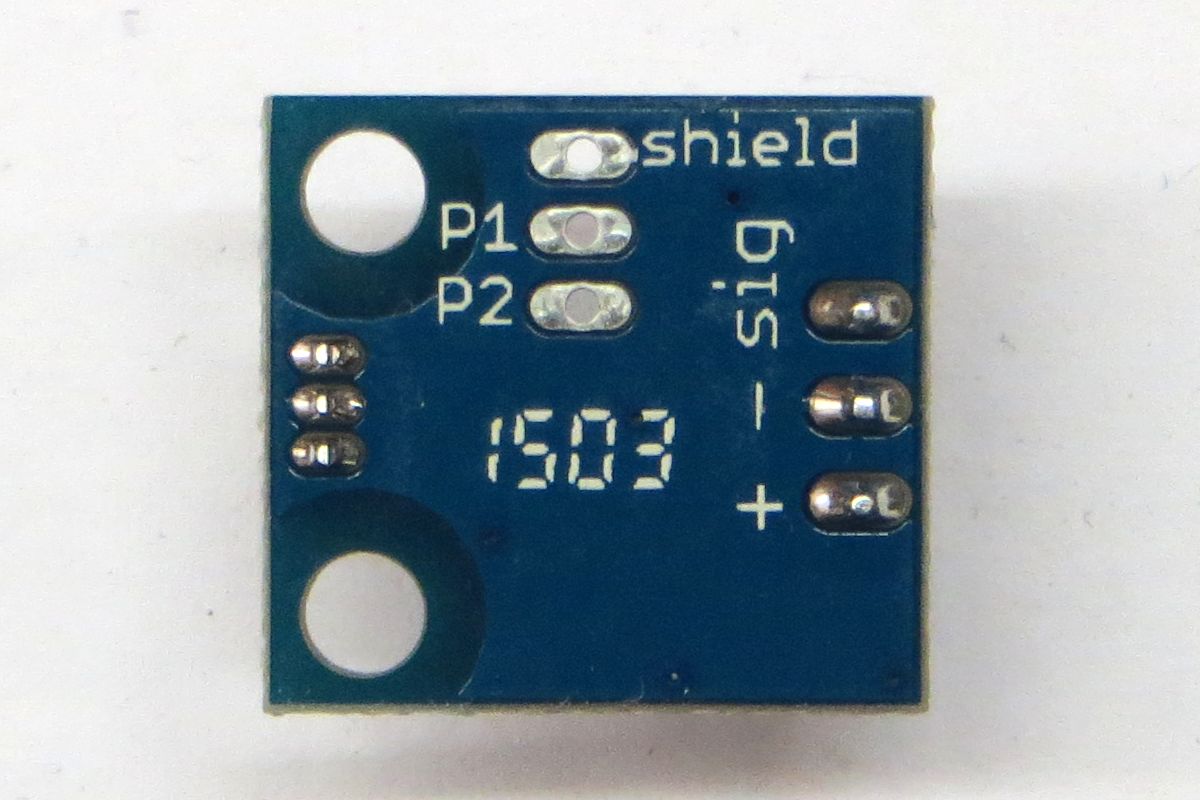
Ansicht von unten.
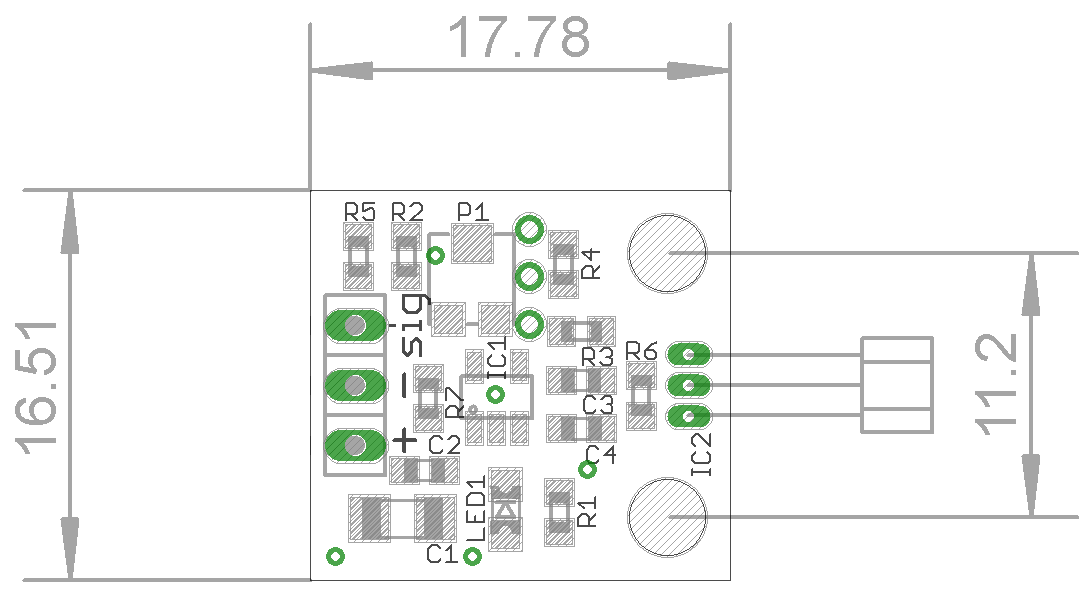
Abmessungen der Platine. Die Befestigungsbohrungen haben 3,2 mm Durchmesser. Die LED1 leuchtet, wenn der Magnet ausreichend nah ist. Dabei geht der Signal-Pin (sig) von LOW (0 V) auf HIGH (3,3 - 5 V).
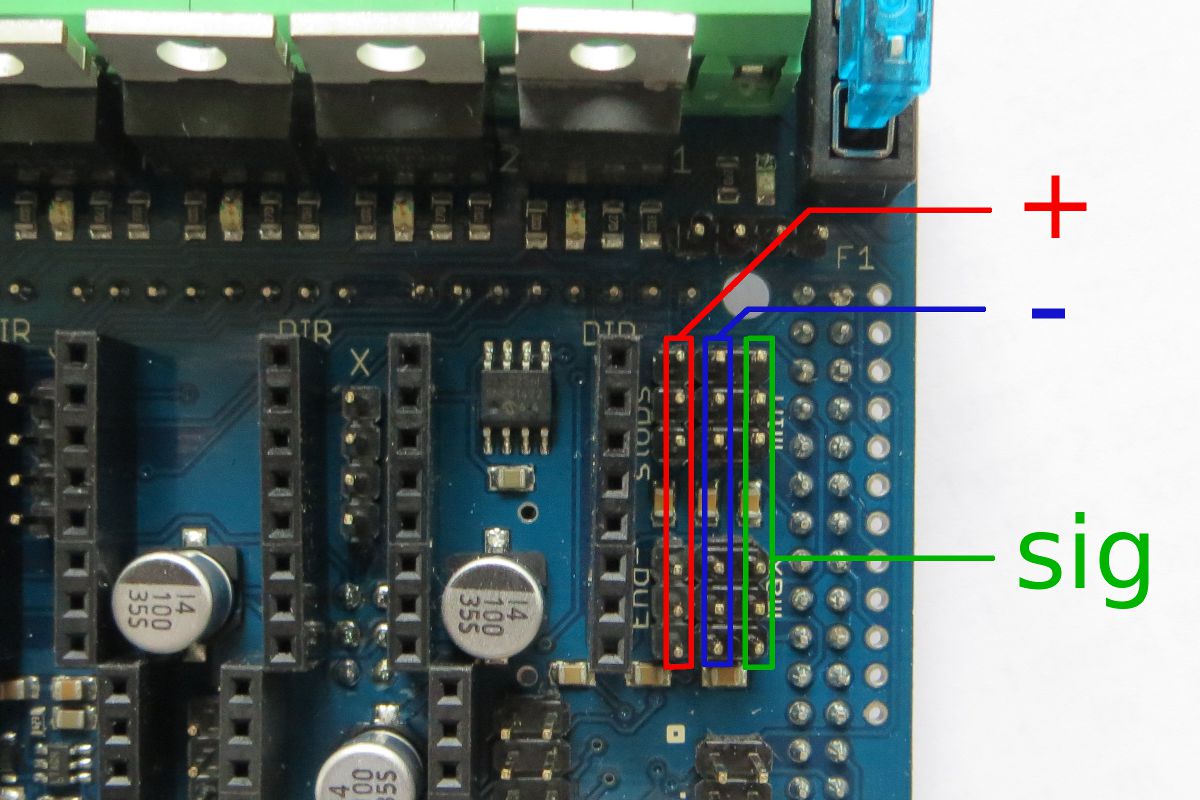
Anschluss des Hall-E an das RADDS. Die Endstops können auch an Boards mit 5 V Logikspannung betrieben werden.
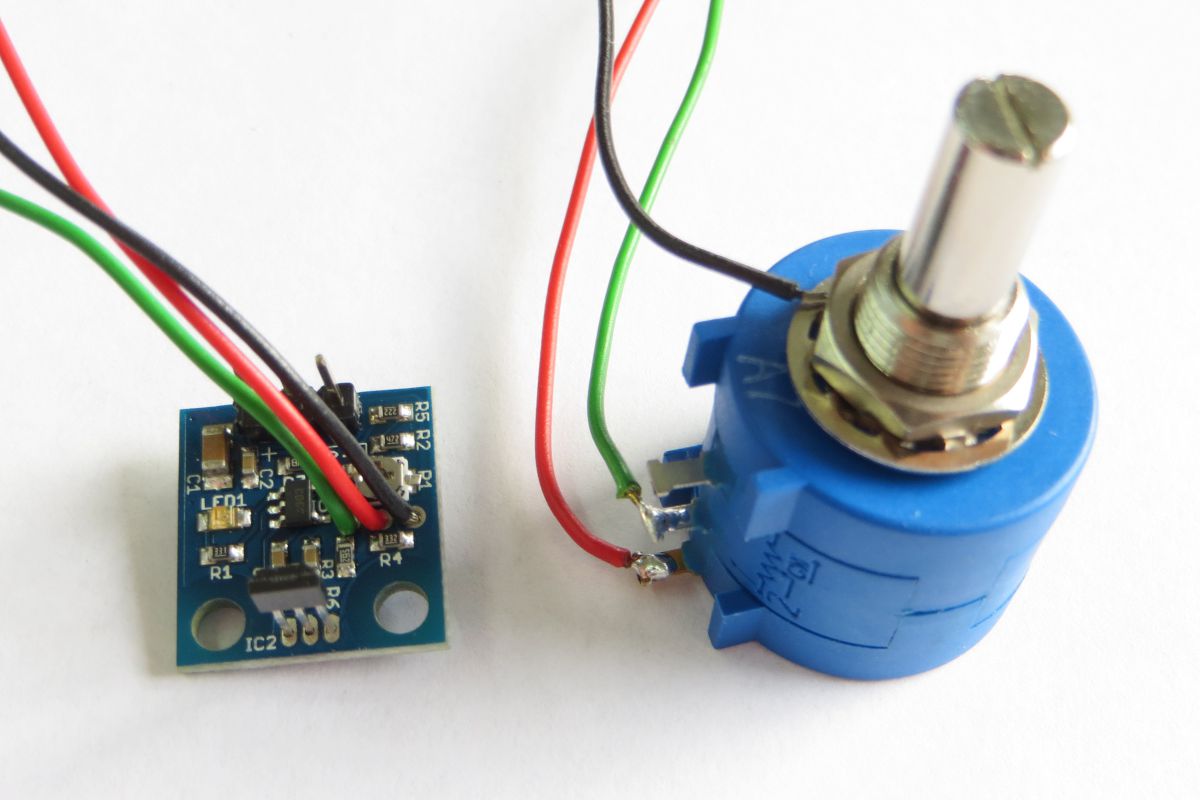
Mit einem Spindelpotentiometer (5 - 10 kOhm) kann die Verstellung noch viel feinfühliger vorgenommen werden. Dabei wird nur der Schleifer und ein Ende des Widerstandes angeschlossen. Der 3te Anschluss ist die Abschirmung.
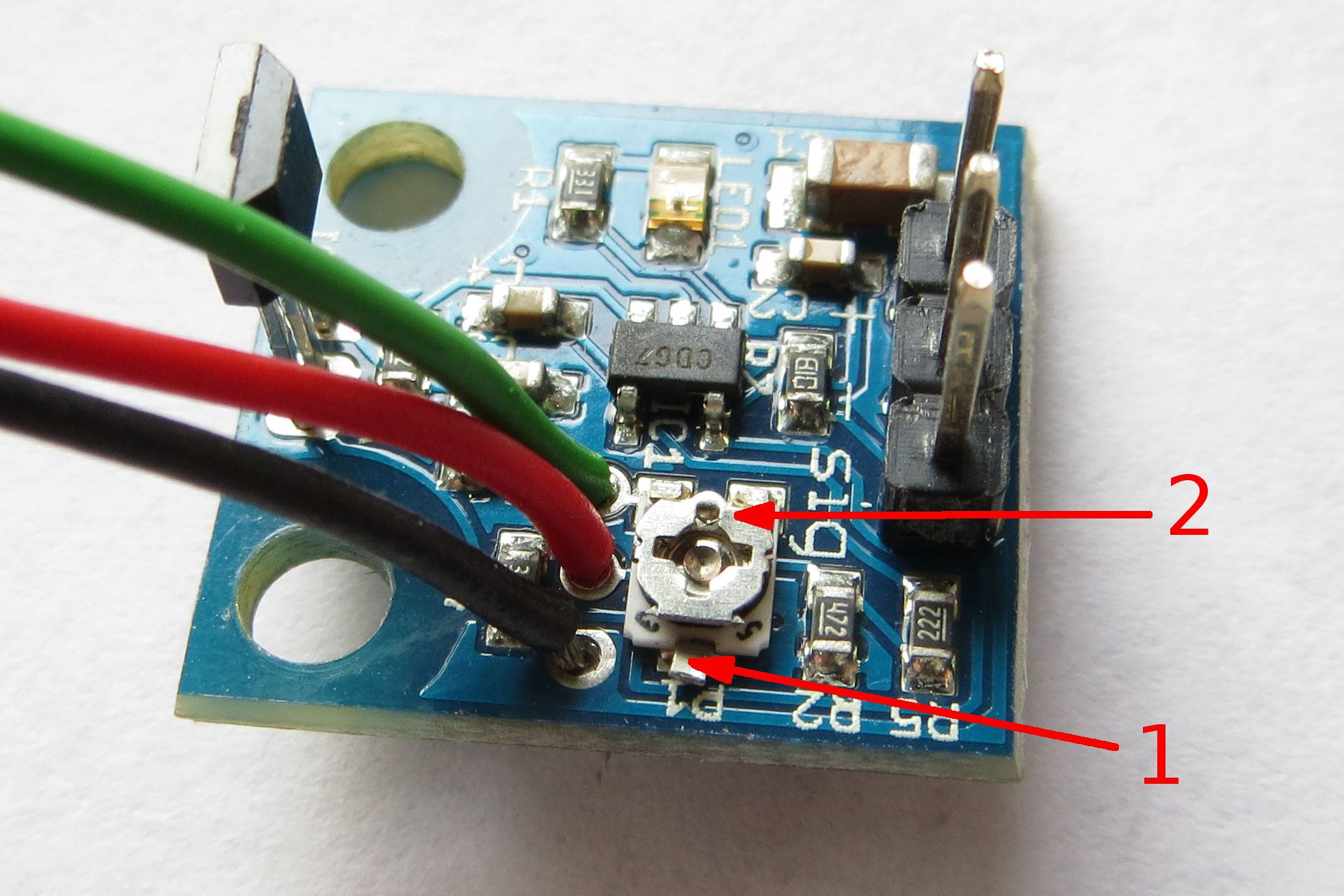
Wenn ein externes Poti angeschlossen wird, muss das Poti auf der Platine deaktiviert werden. Dazu wird der Anschlag umgebogen (1) und der Schleifer genau mittig zwischen die beiden Enden der Widerstandsbahn gedreht (2).
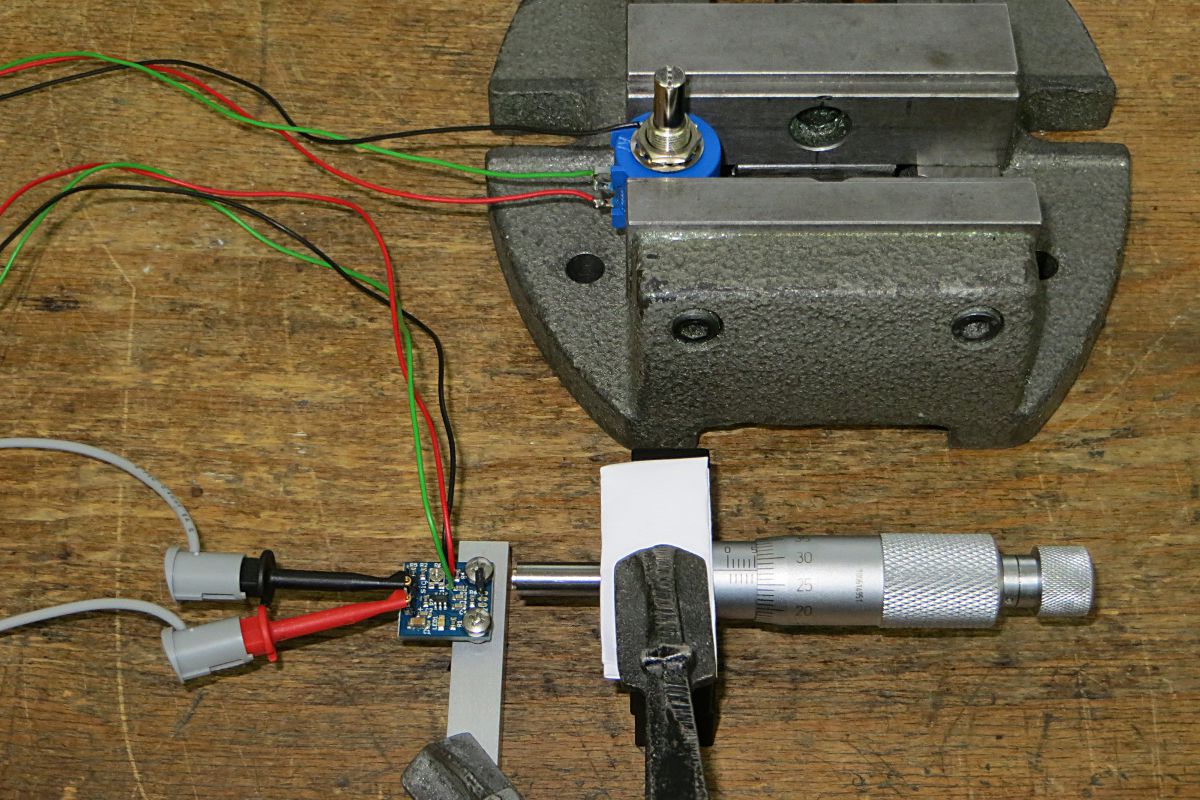
Versuchsaufbau zur Bestimmung des Auslöseabstandes. Wenn der Magnet auf magnetischem Metall befestigt ist (wie hier), dann sind die Abstände etwas größer als bei einer Befestigung auf z.B. Kunststoff.
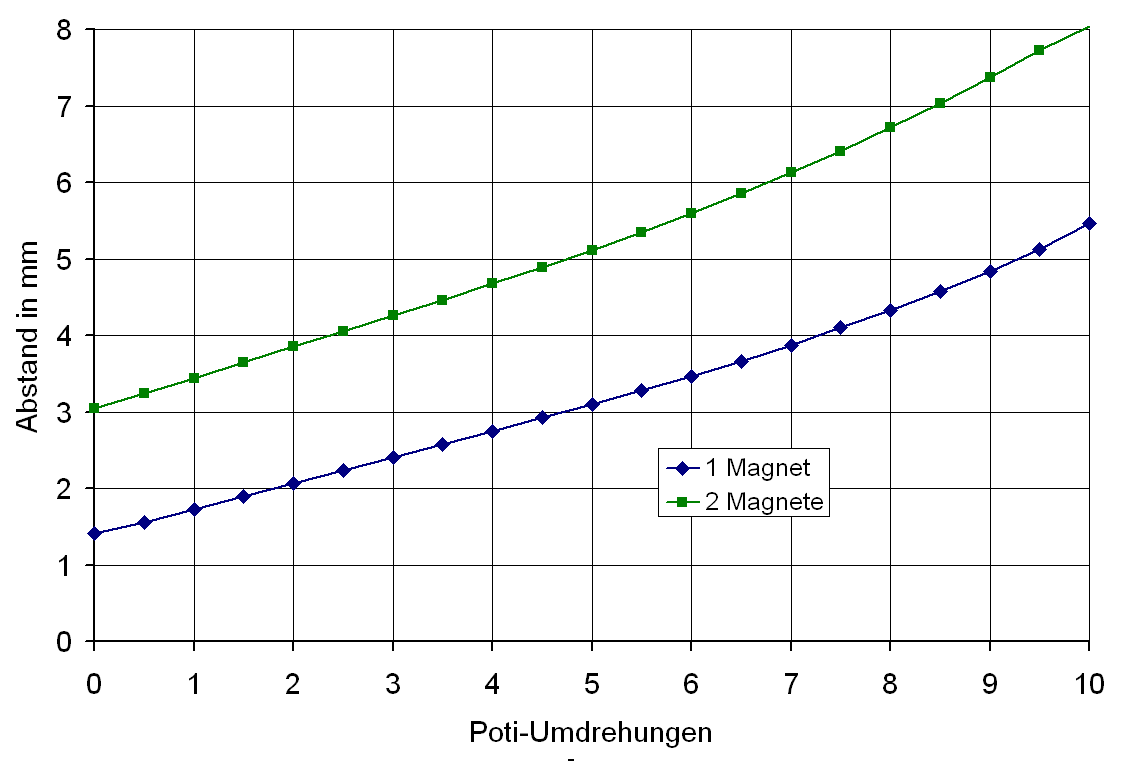
Das Spindelpoti hat 10 Umdrehungen und 10 kOhm. Eine Umdrehung entspricht also 1 kOhm. Das Poti auf der Platine hat 5 kOhm und entsprechend einen Verstellweg von 1,4 bis 3,1 mm (1 Neodym-Magnet N45 mit D = 4 und H = 1).